Pololu Blog » User Profile: Ben » Posts by Ben »
Posts by Ben (Page 7)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New products: MinIMU-9 and AltIMU-10 v5 IMU boards
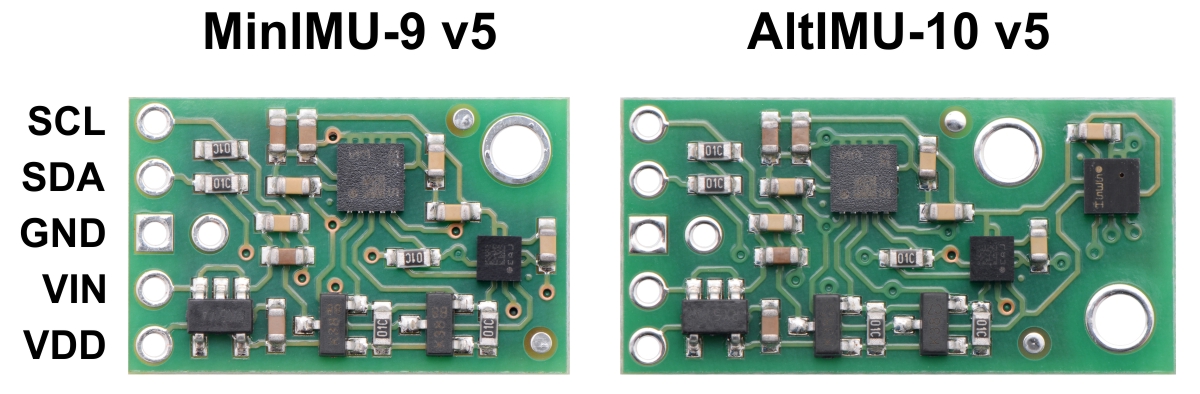 |
We have released new versions of our MinIMU-9 and AltIMU-10 inertial measurement unit (IMU) modules, which use an I²C interface to provide nine independent rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s absolute orientation (the AltIMU also includes an altimeter). These v5 editions feature ST’s new LIS3MDL 3-axis magnetometer and LSM6DS33 3-axis accelerometer and gyro, which allow them to offer improved performance over previous versions at lower prices. The new versions are pin-compatible with the previous ones, though software written for older IMU versions will need to be changed to work with the v5 since the sensor ICs have changed.
We think these new boards combine the best ST MEMS sensors into compact boards at great prices. However, our older MinIMU-9 v3, AltIMU-10 v3, and AltIMU-10 v4 are still available for now at reduced clearance prices, so if you don’t absolutely need ST’s newest sensors on your IMU, these previous versions are still very good sensor boards to consider.
Here’s an updated version of our diagram showing where the new v5 modules fit in:
 |
Evolution and release dates of Pololu carriers for ST’s MEMS sensors through January 2016. |
|---|
Related products







New products: 12V 25D mm gearmotors with encoders
|
|
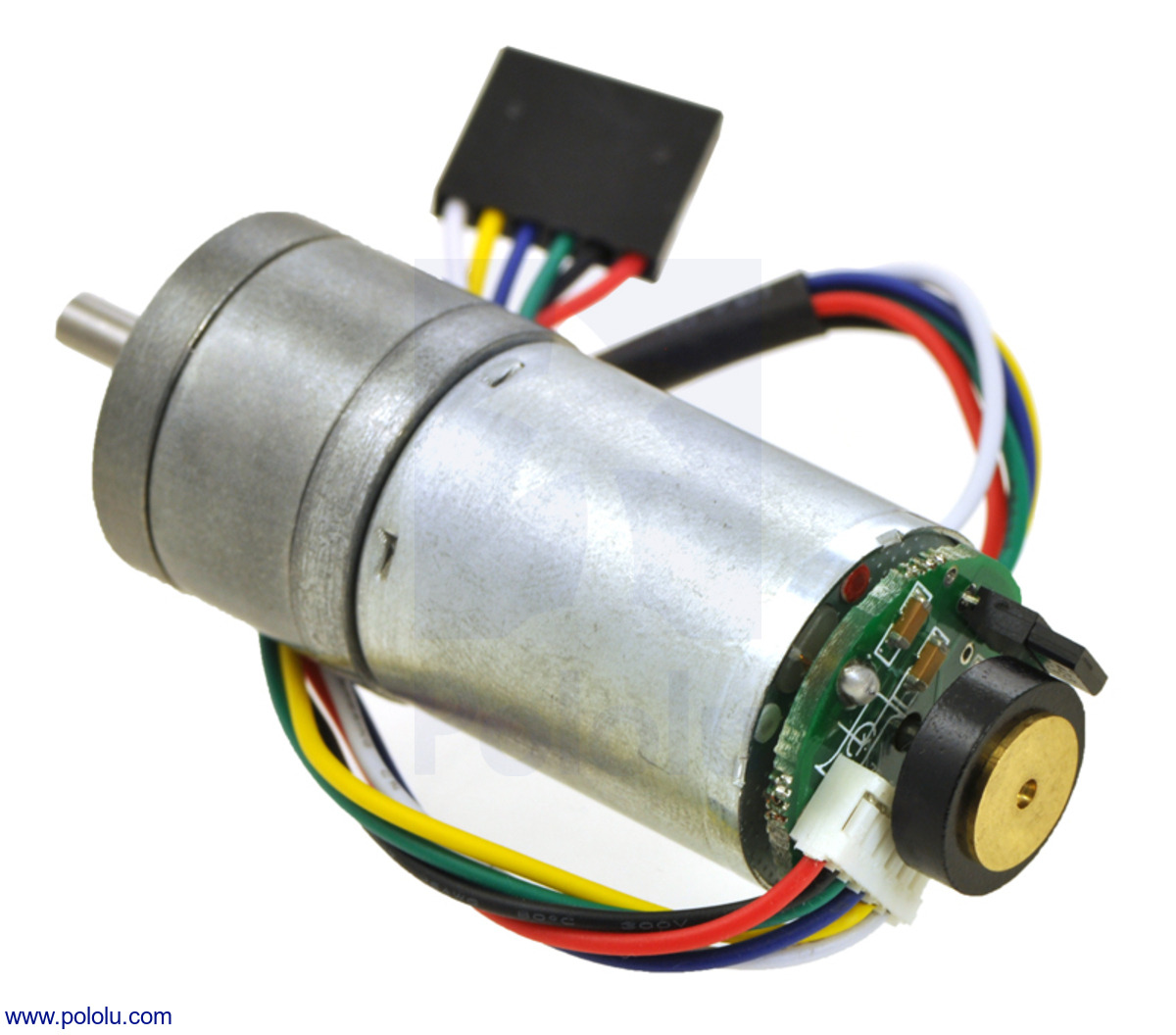

All of our 25D mm metal gearmotors, including the newest versions with 12V motors, are now available with quadrature encoders. That’s 37 new products in all! With five different motor winding options and gear ratios available from 4.4:1 through 499:1, our total selection of 25D mm metal gearmotors has grown to nearly 100 options:


Closed December 25 and January 1
 |
We will be closed for Christmas on Friday, December 25 and for New Year’s Day on Friday, January 1, so orders placed after 2 PM Pacific Time on the 24th or 31st will be shipped on the following Monday. Additionally, FedEx Ground does not ship on the 24th (tomorrow).
Merry Christmas and happy New Year!
New products: 3.3V, 5V, 6V, 7.5V, and 9V Step-Down Voltage Regulator D24V22Fx
 |
This post is a few weeks late, but I am following up on my original D24V22F12 12V regulator introduction to let you know that we now have 3.3 V, 5 V, 6 V, 7.5 V, 9 V, and 12 V versions of our new D24V22Fx family of step-down voltage regulators. These regulators all have typical efficiencies of 85% to 95% and can deliver continuous currents over 2 A in typical applications.
The new D24V22Fx regulators are priced lower than the older D24V25Fx family that they will be replacing. The two designs have the same size and similar current capabilities and input voltage ranges, but they do not have the same pinout and are based on different internal circuits, so there are fundamental differences in operation. In particular, these newer D24V22Fx regulators have much lower dropout voltages and provide a “power good” signal, and the newer design allows for higher output voltages (e.g. 12 V).
See the product pages for any of the D24V22Fx regulators for more information on these new regulators, or visit our voltage regulator category to see all of our regulator options.
Related products






Black Friday/Cyber Monday deals revealed!
All of the sale details are now listed on our Black Friday/Cyber Monday sale page. Check them out and get your carts ready because the sale starts in less than six hours! Here are just some of the deals:


Our Black Friday/Cyber Monday sale is almost here!

Our biggest sale of the year is less than two days away! As in previous years, we are offering huge discounts on hundreds of products, but we’re also introducing a new feature this time around: upgrades to the next best price break on the rest of the products we carry. You will also be able to select free bonus items with orders over $100. We have put up some of the special offers on the Black Friday/Cyber Monday sale page; stay tuned for more details, including the full list of discounted products and coupon codes.
37D mm metal gearmotors with encoders and end caps
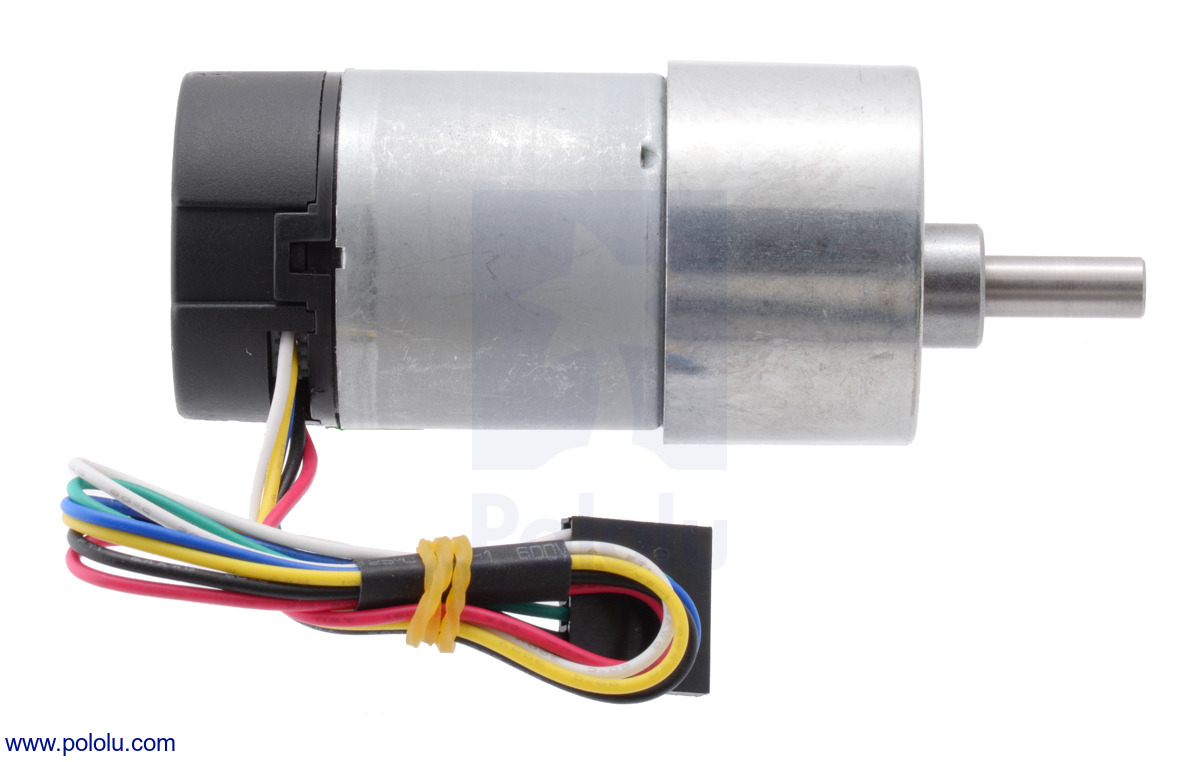 |
Our 37D mm metal gearmotors now have fitted plastic end caps over their encoders that neatly protect the assembly and keep stray objects clear of the magnetic disc. The pictures below show the previous version (without end cap) next to one of the new ones:
|
|
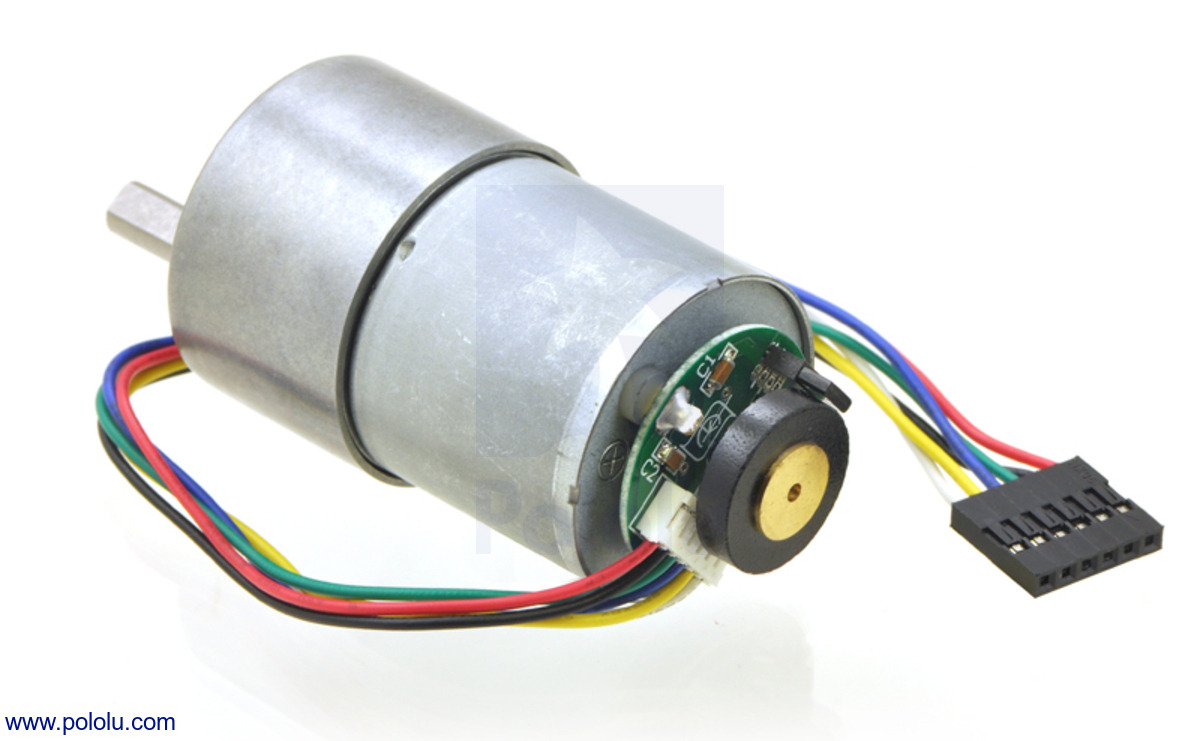
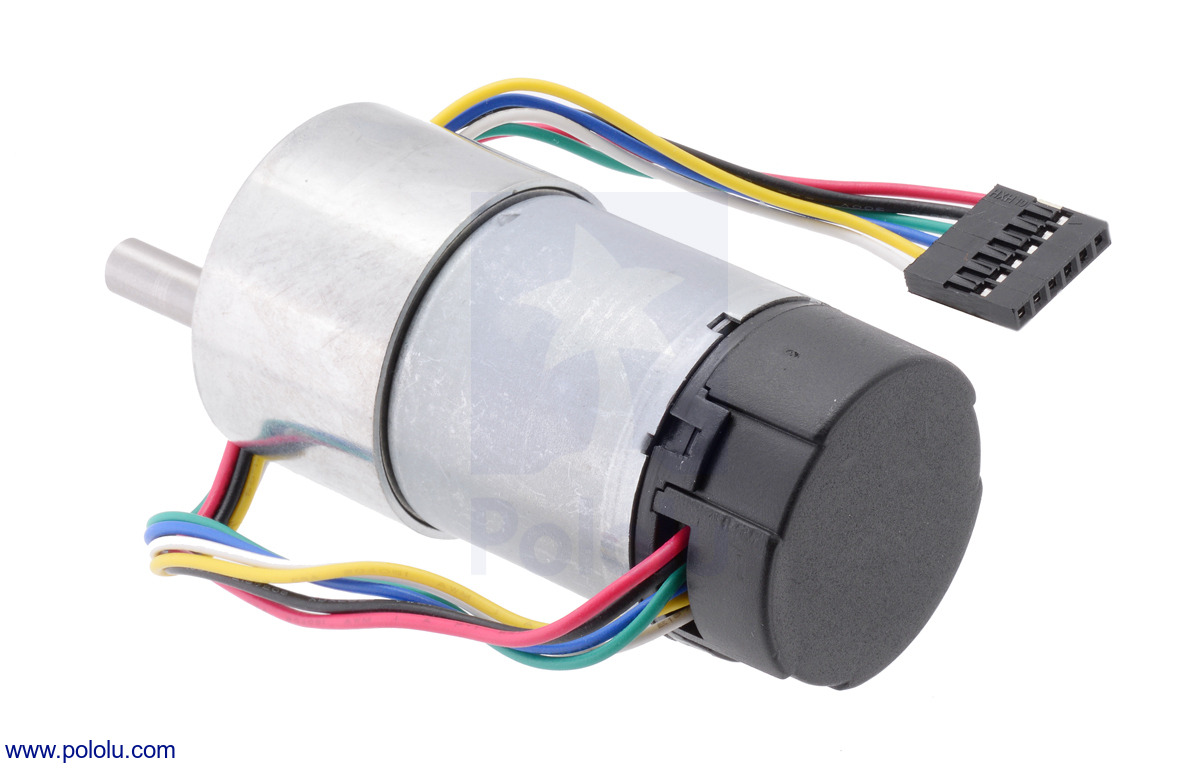
The end cap is easily removable if you need to access the encoder or want a few more millimeters of clearance for your gearmotor, but there is a little bit of base plastic that will remain (as shown in the picture below), so removing the end cap does not quite make these new ones identical to the previous versions.
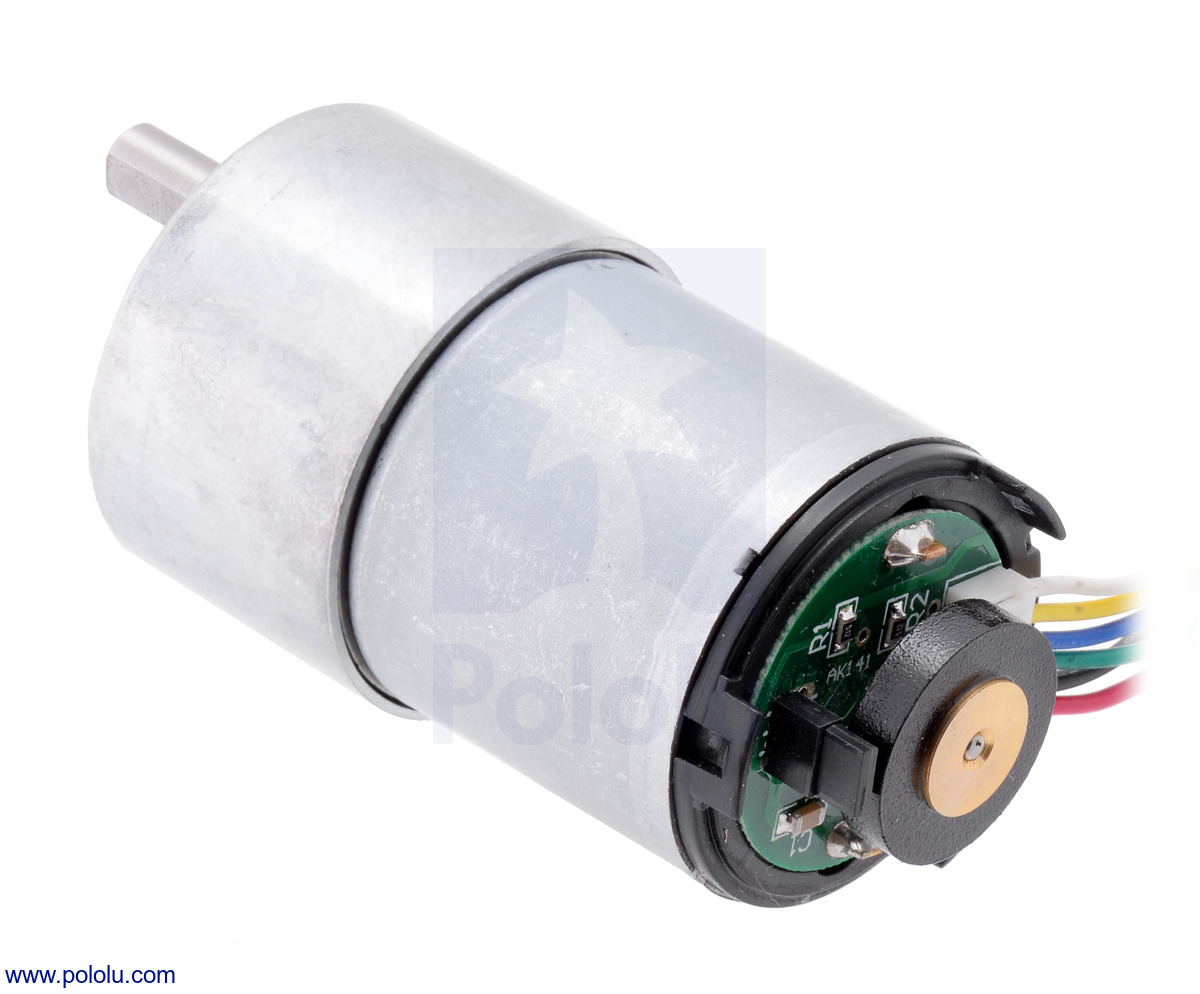 |
37D mm metal gearmotor with 64 CPR encoder (with end cap removed). |
|---|
These gearmotors are available in six different gear ratios and with or without encoders, and we also carry the motor and encoder assembly by itself with no gearbox. The following table shows all of our 37D mm metal gearmotor options:
| Gear Ratio | No-Load Speed @ 12 V |
Stall Torque @ 12 V |
Stall Current @ 12 V |
 With Encoder |
 Without Encoder |
|---|---|---|---|---|---|
| 1:1 | 11,000 RPM | 5 oz-in | 5 A | motor without gearbox | |
| 19:1 | 500 RPM | 84 oz-in | 5 A | 37Dx52L mm | 37Dx52L mm |
| 30:1 | 350 RPM | 110 oz-in | 5 A | 37Dx52L mm | 37Dx52L mm |
| 50:1 | 200 RPM | 170 oz-in | 5 A | 37Dx54L mm | 37Dx54L mm |
| 70:1 | 150 RPM | 200 oz-in | 5 A | 37Dx54L mm | 37Dx54L mm |
| 100:1 | 100 RPM | 220 oz-in | 5 A | 37Dx57L mm | 37Dx57L mm |
| 131:1 | 80 RPM | 250 oz-in | 5 A | 37Dx57L mm | 37Dx57L mm |
Related products


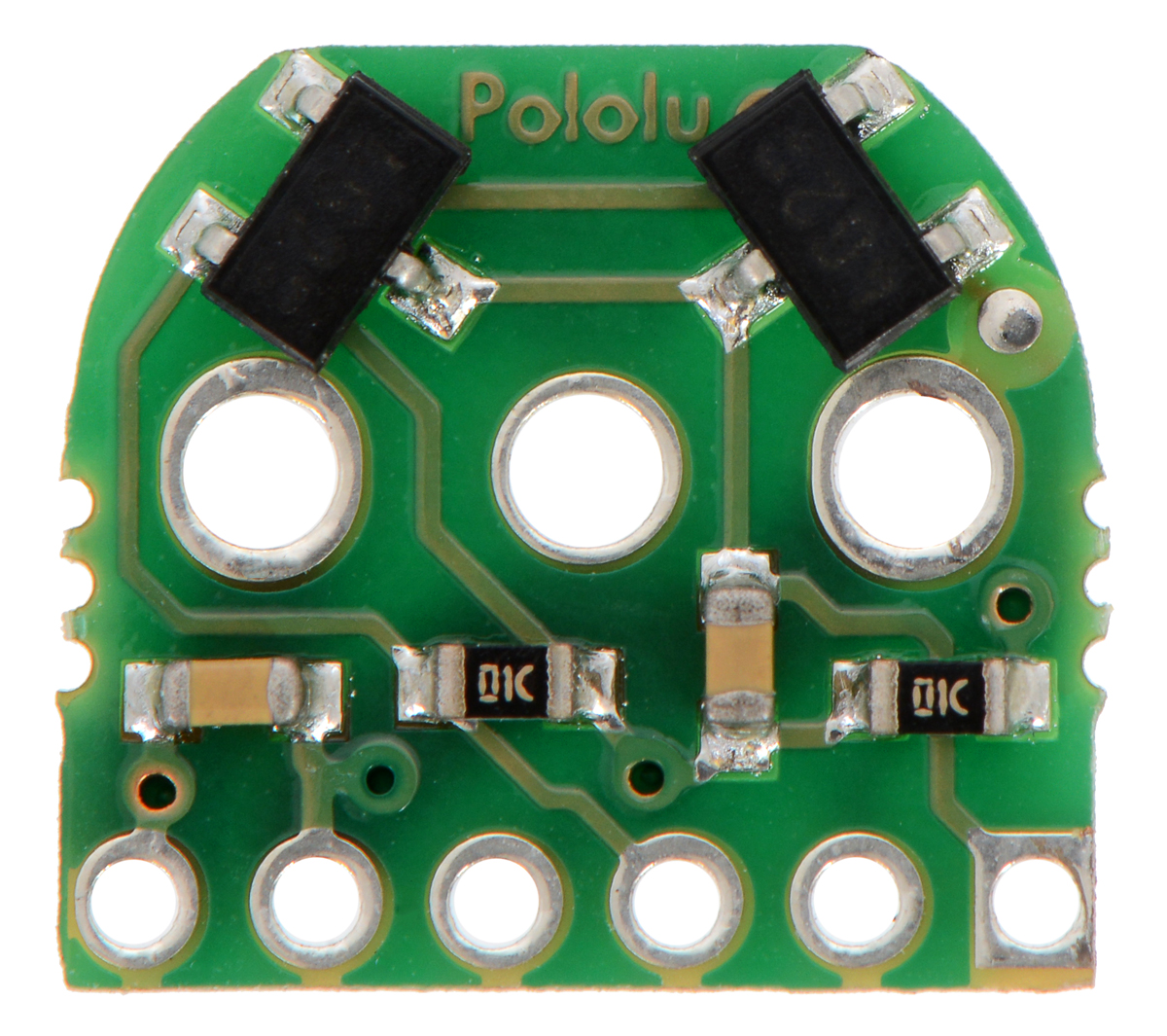
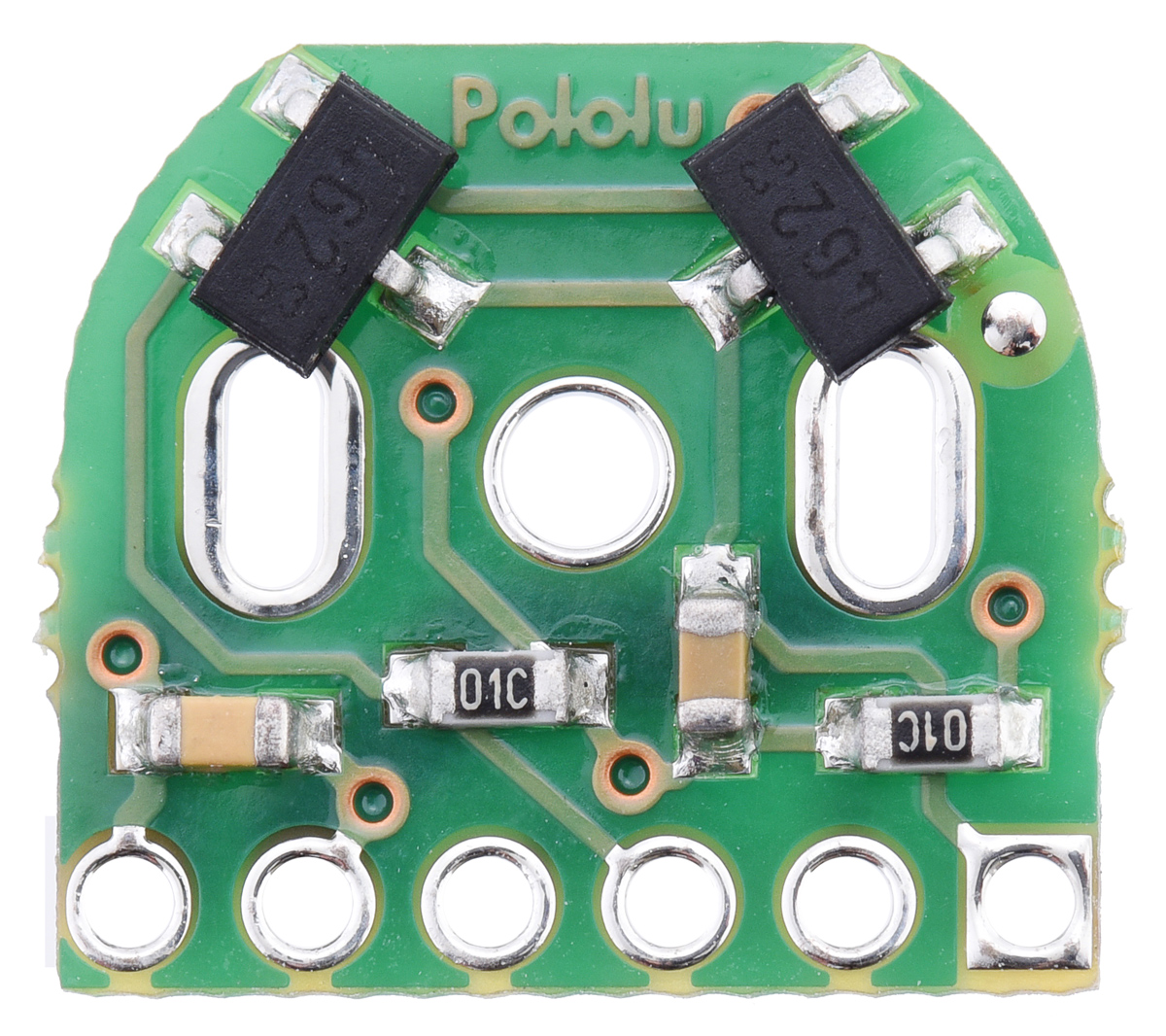
HPCB micro metal gearmotors with extended motor shafts
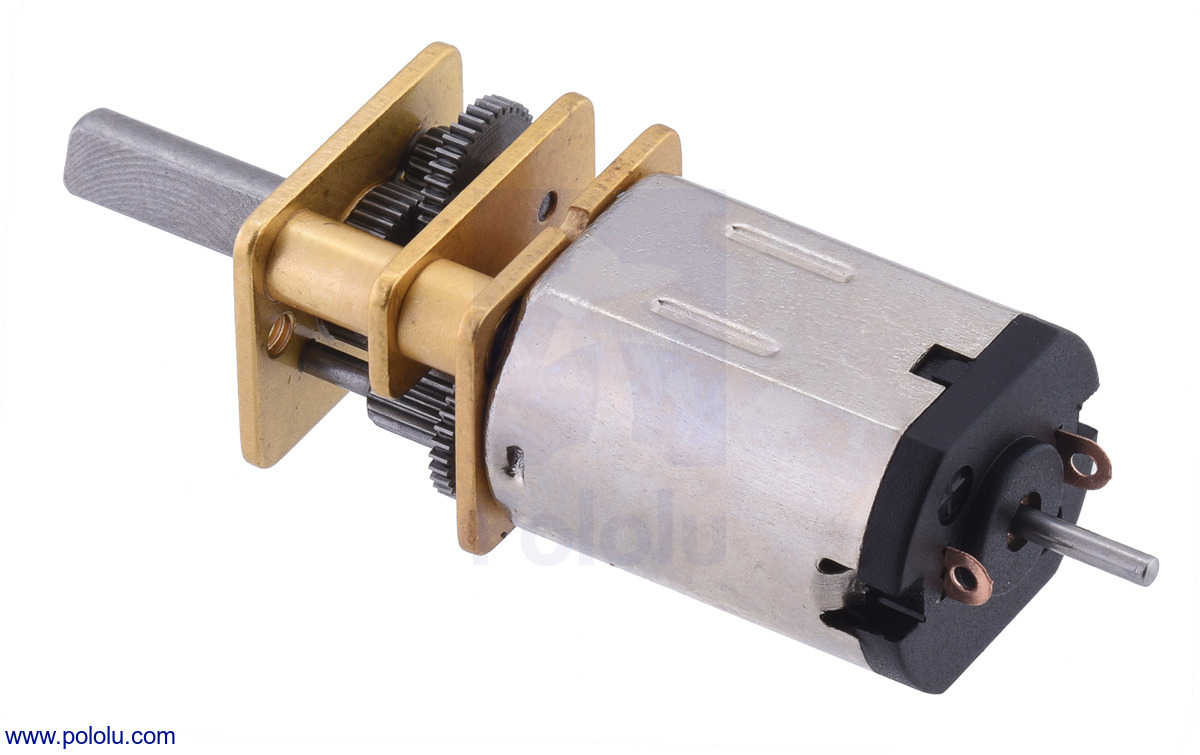 |
It has been a few months since we introduced our new high-power micro metal gearmotors with longer life carbon brushes. We now have them available with dual shafts, and we have made a corresponding update to our magnetic encoders to let them work with the larger terminals of the HPCB motors.
|
|
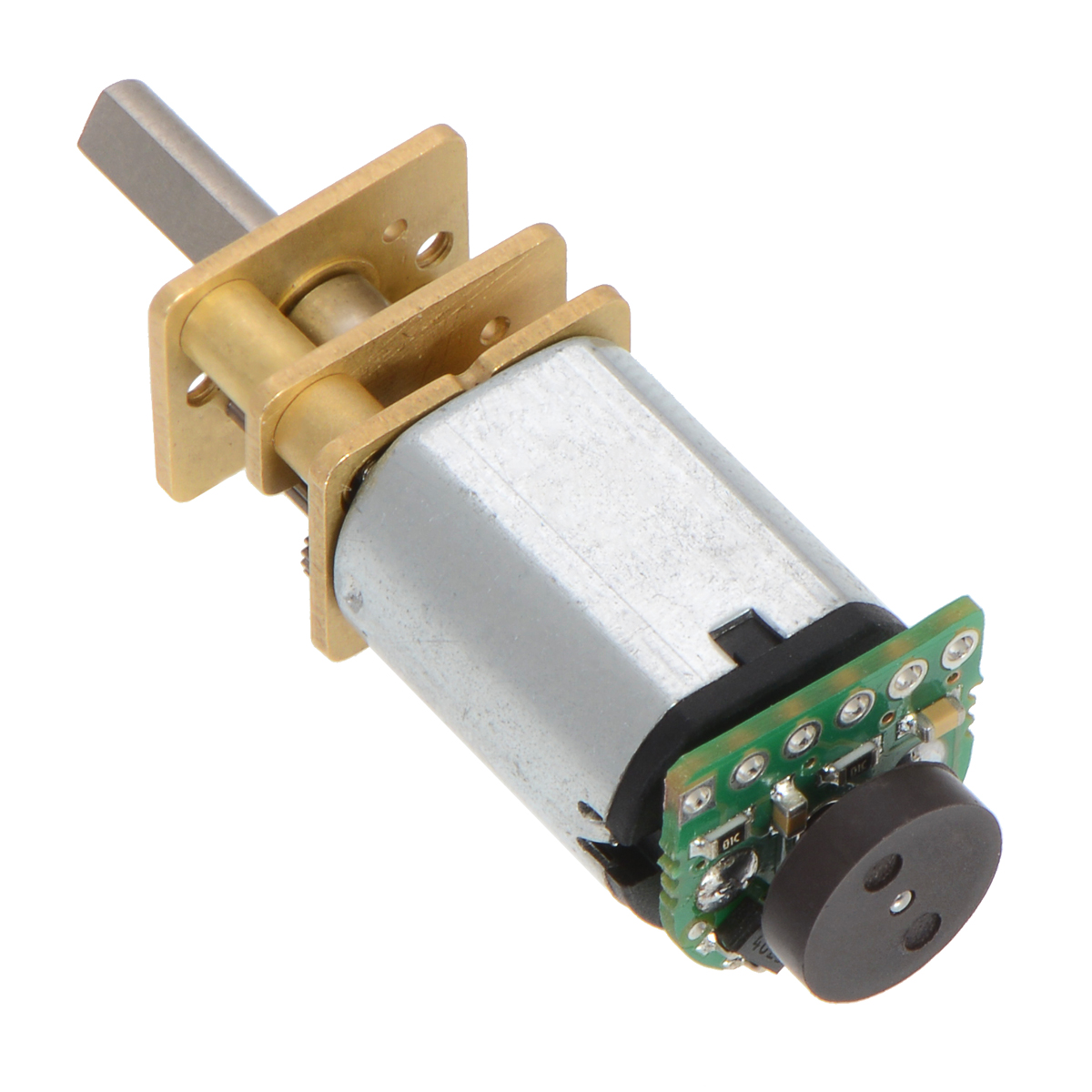 |
You might see similar-looking motors elsewhere, but no one comes close to our offering, from the quality of the gears to the variety of winding options to the selection of gear ratios, all in stock for shipment the day you order. By bringing together Pololu’s exclusive features of high-power windings, long-life carbon brushes, and encoders for closed-loop feedback control into a single package, these latest motors and encoders really demonstrate our continual investment in this popular form factor. With ten gear ratios available, from 10:1 through 1000:1, our total selection of micro metal gearmotors has grown to nearly 70 options:
| Motor Type | Stall Current @ 6 V |
No-Load Speed @ 6 V |
Approximate Stall Torque @ 6 V |
 Single-Shaft (Gearbox Only) |
 Dual-Shaft (Gearbox & Motor) |
|---|---|---|---|---|---|
| high-power, carbon brushes (HPCB) |
1600 mA | 3000 RPM | 4 oz-in | 10:1 HPCB | 10:1 HPCB dual-shaft |
| 1000 RPM | 9 oz-in | 30:1 HPCB | 30:1 HPCB dual-shaft | ||
| 625 RPM | 15 oz-in | 50:1 HPCB | 50:1 HPCB dual-shaft | ||
| 400 RPM | 22 oz-in | 75:1 HPCB | 75:1 HPCB dual-shaft | ||
| 320 RPM | 30 oz-in | 100:1 HPCB | 100:1 HPCB dual-shaft | ||
| 200 RPM | 40 oz-in | 150:1 HPCB | 150:1 HPCB dual-shaft | ||
| 140 RPM | 50 oz-in | 210:1 HPCB | 210:1 HPCB dual-shaft | ||
| 120 RPM | 60 oz-in | 250:1 HPCB | 250:1 HPCB dual-shaft | ||
| 100 RPM | 70 oz-in | 298:1 HPCB | 298:1 HPCB dual-shaft | ||
| 32 RPM | 125 oz-in | 1000:1 HPCB | 1000:1 HPCB dual-shaft | ||
| high-power (HP) (same specs as HPCB above) |
1600 mA | 6000 RPM | 2 oz-in | 5:1 HP | |
| 3000 RPM | 4 oz-in | 10:1 HP | 10:1 HP dual-shaft | ||
| 1000 RPM | 9 oz-in | 30:1 HP | 30:1 HP dual-shaft | ||
| 625 RPM | 15 oz-in | 50:1 HP | 50:1 HP dual-shaft | ||
| 400 RPM | 22 oz-in | 75:1 HP | 75:1 HP dual-shaft | ||
| 320 RPM | 30 oz-in | 100:1 HP | 100:1 HP dual-shaft | ||
| 200 RPM | 40 oz-in | 150:1 HP | 150:1 HP dual-shaft | ||
| 140 RPM | 50 oz-in | 210:1 HP | |||
| 120 RPM | 60 oz-in | 250:1 HP | |||
| 100 RPM | 70 oz-in | 298:1 HP | 298:1 HP dual-shaft | ||
| 32 RPM | 125 oz-in | 1000:1 HP | 1000:1 HP dual-shaft | ||
| medium-power (MP) |
700 mA | 2200 RPM | 3 oz-in | 10:1 MP | 10:1 MP dual-shaft |
| 730 RPM | 8 oz-in | 30:1 MP | |||
| 420 RPM | 13 oz-in | 50:1 MP | |||
| 290 RPM | 17 oz-in | 75:1 MP | 75:1 MP dual-shaft | ||
| 220 RPM | 19 oz-in | 100:1 MP | 100:1 MP dual-shaft | ||
| 150 RPM | 24 oz-in | 150:1 MP | |||
| 75 RPM | 46 oz-in | 298:1 MP | |||
| 25 RPM | 80 oz-in | 1000:1 MP | 1000:1 MP dual-shaft | ||
| low-power | 360 mA | 2500 RPM | 1 oz-in | 5:1 | |
| 1300 RPM | 2 oz-in | 10:1 | |||
| 440 RPM | 4 oz-in | 30:1 | 30:1 dual-shaft | ||
| 250 RPM | 7 oz-in | 50:1 | 50:1 dual-shaft | ||
| 170 RPM | 9 oz-in | 75:1 | |||
| 120 RPM | 12 oz-in | 100:1 | 100:1 dual-shaft | ||
| 85 RPM | 17 oz-in | 150:1 | |||
| 60 RPM | 27 oz-in | 210:1 | |||
| 50 RPM | 32 oz-in | 250:1 | |||
| 45 RPM | 40 oz-in | 298:1 | 298:1 dual-shaft | ||
| 14 RPM | 70 oz-in | 1000:1 | 1000:1 dual-shaft |
You can see all ten of the new versions below, and if there are any versions we do not yet have that you would like to see us carry, let us know in the comments!
Related products



Polo-BOO! Halloween Sale
Halloween is just around the corner, but there is still time for you makers out there to build terrifying interactive props and amazing costumes, and we want to help. From now through October 21, we are having a sale on servos and servo controllers, proximity sensors, programmable microcontroller boards, power supplies, and more – all the products you might want to bring your creepy creations to life. See the sale page for more details and the full list of products.
If you need some inspiration, check out our sample Halloween projects, and as always, we would love to hear about anything cool you make with our products; we might feature it on the blog!
New product: 12V, 2.2A Step-Down Voltage Regulator D24V22F12
 |
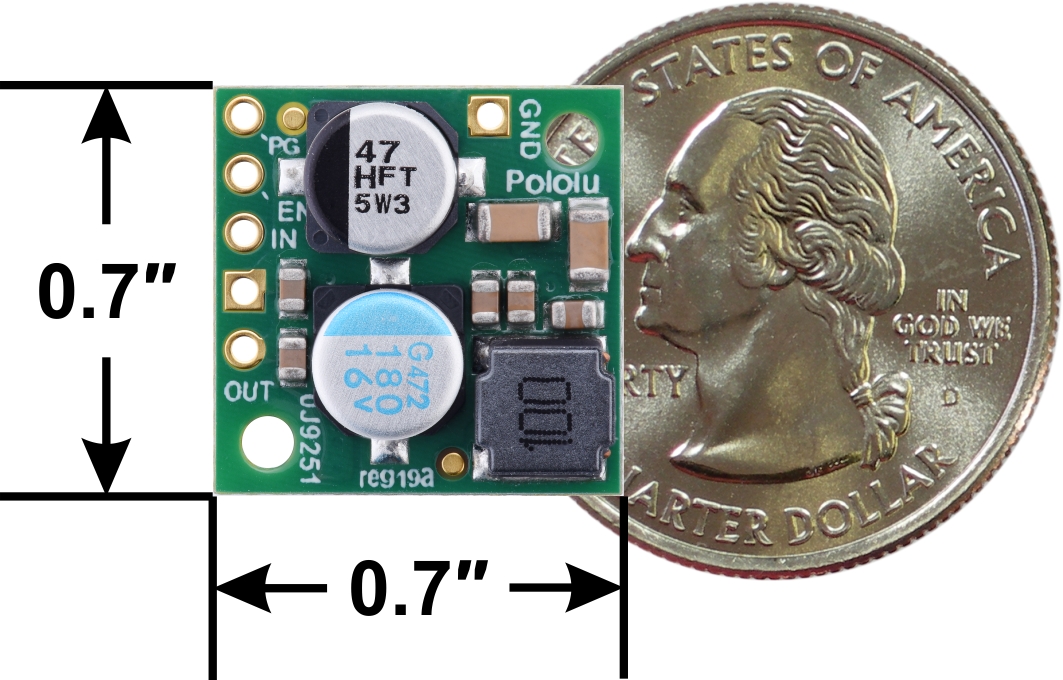
We are pleased to introduce our new 12 V, 2.2 A switching regulator, the inaugural member of the D24V22Fx family of step down voltage regulators. We expect to release other voltage versions next month, but we wanted to get a 12 V version out right away since we did not offer a 12 V buck regulator that could do more than 1 A. The compact regulator works with input voltages up to 36 V and can typically deliver up to a continuous 2.2 A. It offers integrated reverse voltage protection along with over-current and over-temperature shutoff, and a power-good output can be used to determine when the regulator cannot maintain its output voltage.
|
|
|
Unlike linear regulators which waste a lot of power and generate a lot of heat in the process, this new regulator is very efficient, which means you can get the most out of your battery life:
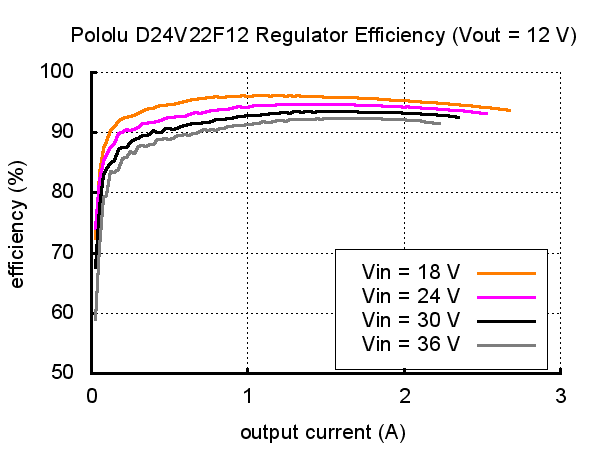 |
Until we release other voltage versions of the D24V22Fx, the closest substitutes are the similar D24V25Fx family of step-down voltage regulators:
These regulators are the same size as the D24V22F12 and they have similar current capabilities and input voltage ranges, but they do not have the same pinout and they are based on a different internal design, so there are fundamental differences in operation.
See the D24V22F12 product page for more information on this new regulator, or visit our voltage regulator category to see all of our regulator options.
Related products


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










