Pololu Blog » User Profile: Ben » Posts by Ben »
Posts by Ben (Page 6)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Cyber Monday 2016

We have had a lot of fun with this year’s Black Friday/Cyber Monday sale so far, and I hope many of you have, too. The sale isn’t over yet, but it will be soon, so make sure you get any last-minute orders placed in the next eight hours!
Also, a big thank-you to the shipping department for getting all the orders out (especially to those who came in on the weekend to make sure everything went smoothly)!
 |
Black Friday 2016
Our Black Friday / Cyber Monday sale is going strong, and we have been working hard to make and ship the products that people are getting great deals on. If you have already placed an order, thank you! If you are still trying to decide if you want to take advantage of our amazing deals, don’t wait too long—the sale ends Monday night.
Act now to get free-ish shipping during our Black Friday/Cyber Monday Sale!

We’re less than two days away from our annual Black Friday/Cyber Monday sale, our biggest sale of the year! This year, in addition to our usual doorbuster deals (limited total quantity promotions at extreme discounts) and large discounts, we are offering up to $7 off of shipping for those who claim their coupon before the sale begins. For many of our smaller items shipping within the US, that discount will be enough to make shipping free, and it should also make a meaningful reduction in shipping costs for our international customers who want to participate in this American tradition. To take advantage of this offer, just log in to your account and follow this link, which will generate a coupon code just for you. You must get your coupon before the sale begins, and you can then use it during our sale, which will run from Wednesday, November 23 through Monday, November 28. Keep an eye on our Black Friday/Cyber Monday sale page for all the latest about the sale!
New product: Raspberry Pi Model A+ 512MB RAM
 |
We are now carrying the Raspberry Pi Model A+ 512MB, which is just like the previous Model A+ but with double the RAM, so it also works with our various Raspberry Pi expansion boards. In particular, it can be combined with our A-Star 32U4 Robot Controller with Raspberry Pi Bridge to make a powerful control center for a small robot (check out this tutorial).
 |
A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge on a Raspberry Pi Model A+. |
|---|
And speaking of small robots, stay tuned for some fun new products that will also work with the Raspberry Pi!
 |
Related products



New versions of our 38 kHz IR proximity sensors
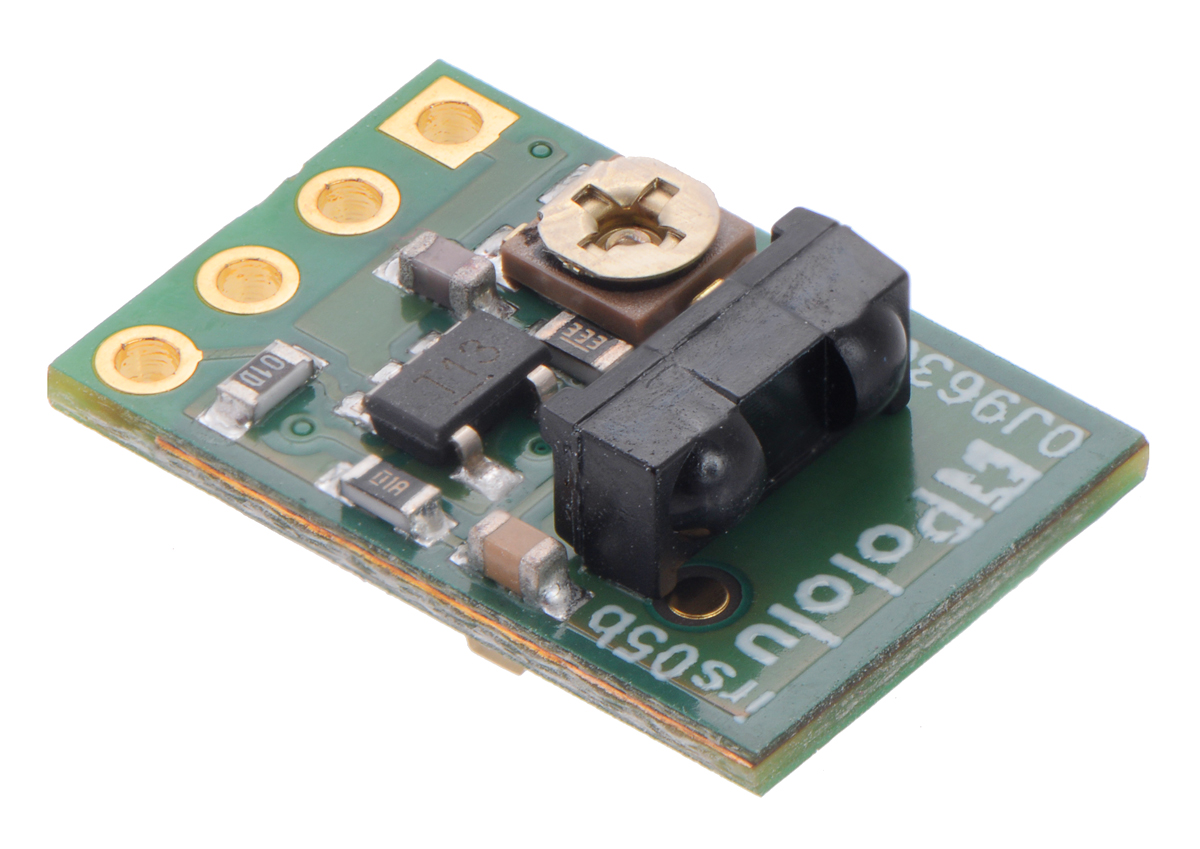 |
We have released slightly updated (irs05b) versions of our 38 kHz IR proximity sensors and discontinued the previous (irs05a) versions. The main changes are to the locations of the IR emitter and receiver, which have been moved away from the edge of the board. This results in better shielding from the PCB itself, which improves performance. Also, the front edge is now routed rather than scored to provide a cleaner edge that also slightly improves the sensor performance and consistency.
Like the originals, these new sensors are available in high-brightness and low-brightness versions with typical sensing ranges up to around 24″ (60 cm) and 12″ (30 cm), respectively. The new versions have the same dimensions and pinouts as the originals, so they can be used as drop-in replacements for any applications that are not dependent on the original component locations.
Related products

Video: Romi chassis assembly






Pololu Labor Day weekend sale

We are having a big Labor Day sale throughout the weekend, with 15% discounts on over 800 products when you use the coupon code LABORDAY16. Note that we will be closed on Monday, so orders placed after 2 PM Pacific Time on Friday, September 2 will be shipped on Tuesday, September 6.
For more information, including all of the sale items, see the sale page.
Independence Day weekend sale

In celebration of Independence Day (July 4th), we are discounting selected products by up to 25% and offering an upgrade to the next best price break for everything else in our store. Please note that we will be closed Monday, so orders will not ship until Tuesday, July 5.
For more information, including all the discount coupon codes, see the sale page.
 |
Happy 4th of July!
Memorial Day weekend sale

We are having a big Memorial Day sale now through Monday, with discounts on over 800 products when you use the coupon code MEMORIALDAY16. Stock up on robot parts now so you can build cool things all summer long! Note that we will be closed on Monday, so orders will not ship until Tuesday, May 31.
For more information, including all of the sale items, see the sale page.
Sixteen new micro metal gearmotor versions!
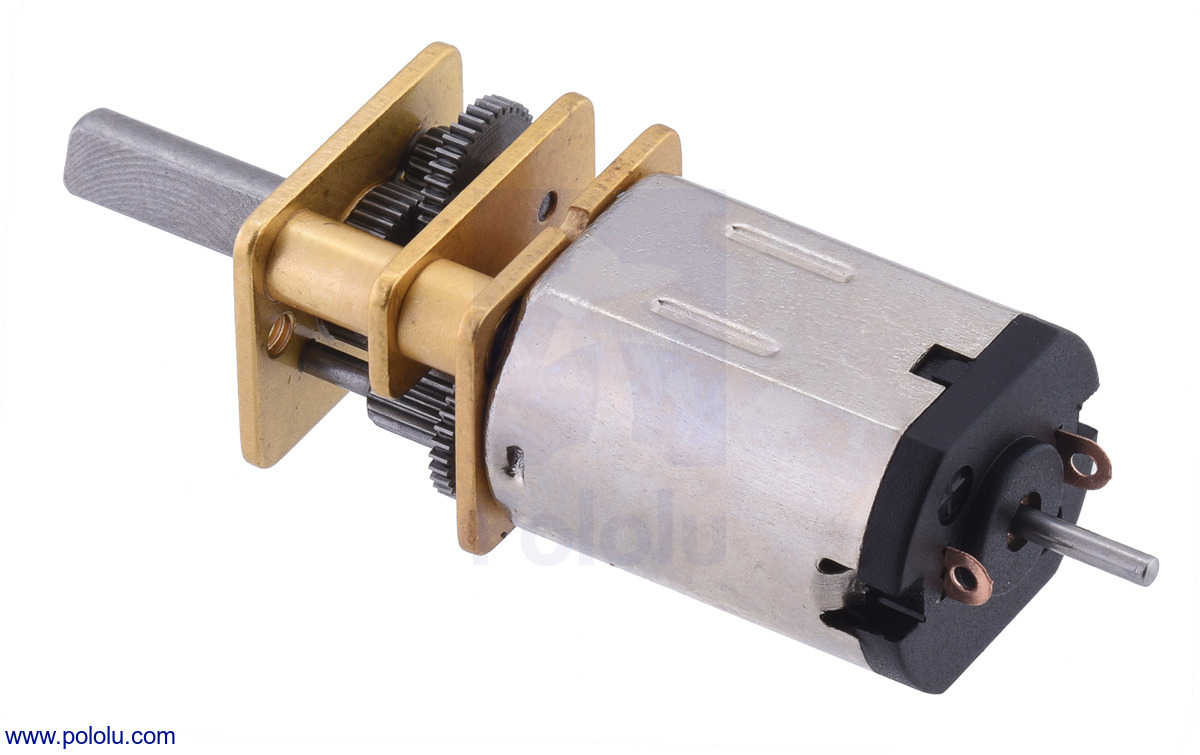 |
We just added 16 new micro metal gearmotors to our already huge selection, including three totally new MP (medium power) gear ratios: 5:1 MP, 210:1 MP, and 250:1 MP. With these new additions, we now have dual-shaft versions available in any combination of our 11 gear ratios and four motor types, giving you 44 different options that work with encoders like our magnetic encoder pair kit.
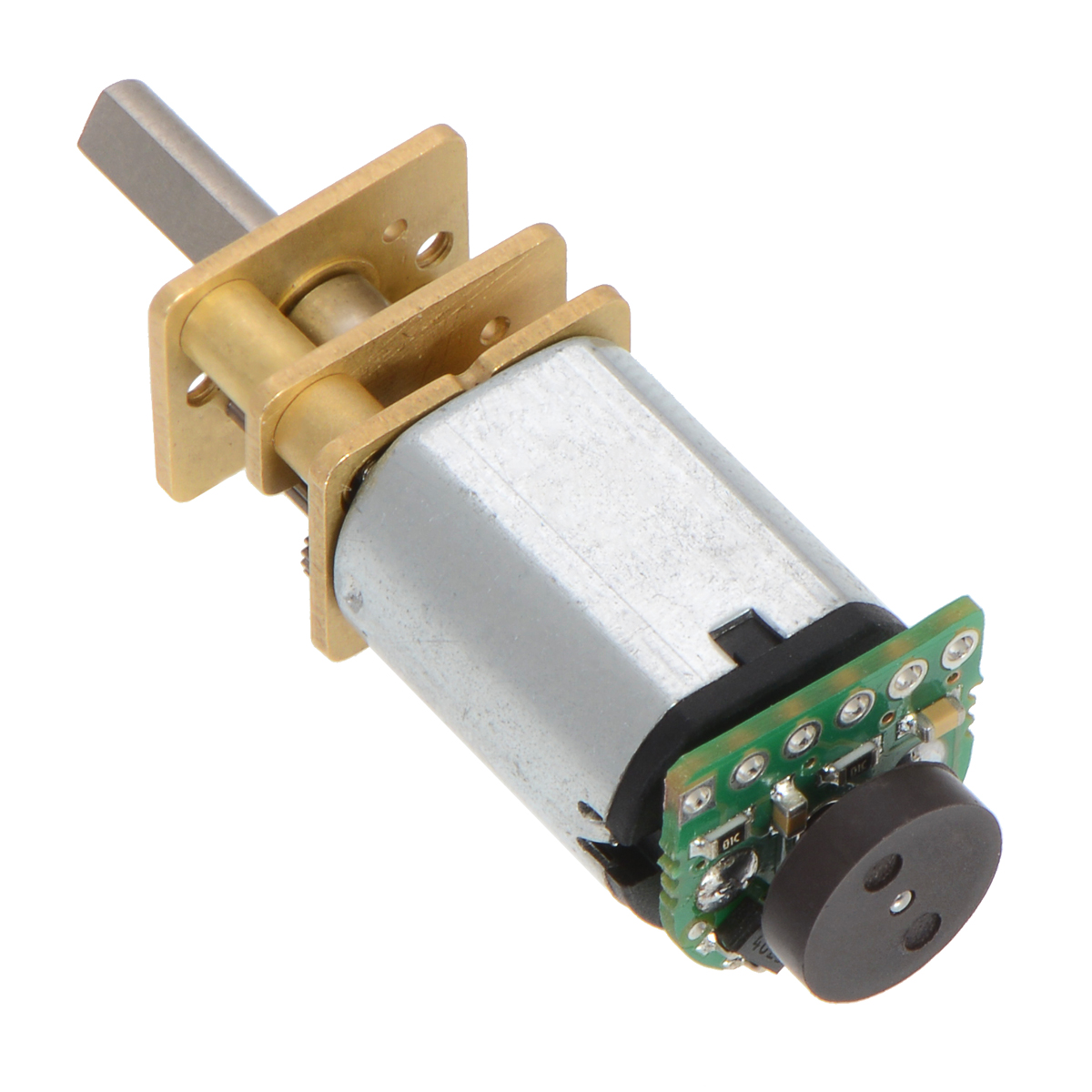 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled on a micro metal gearmotor with extended motor shaft. |
|---|
In all, this increases our total selection of micro metal gearmotors to 85 unique options:




Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










