Pololu Blog »
Pololu Blog (Page 35)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New product: Hakko FA-400 Smoke Absorber
 |
We are now offering the Hakko FA-400 Smoke Absorber. The Hakko FA-400 is a benchtop smoke absorber for removing smoke generated by soldering. It has an easily-replaceable activated-carbon filter and a sturdy ESD-safe housing that can be oriented horizontally or vertically.
Related products

Pololu relay module used in custom ESP8266-based plant watering system
Forum user LuisLabMO posted about his WiFi-controlled plant watering and monitoring system. The system uses SparkFun’s Blynk ESP8266 board to read various sensors that monitor sunlight, moisture content of the soil, and detect the level of water remaining in the watering reservoir. The Blynk signals our 5V relay module to activate the system’s water pump, which irrigates the plants through a drip system. You can read more about LuisLabMO’s watering system in his post, which also has a link to his Hackster.io project page and GitHub repository.
Related products

New version of our USB Micro-B breakout
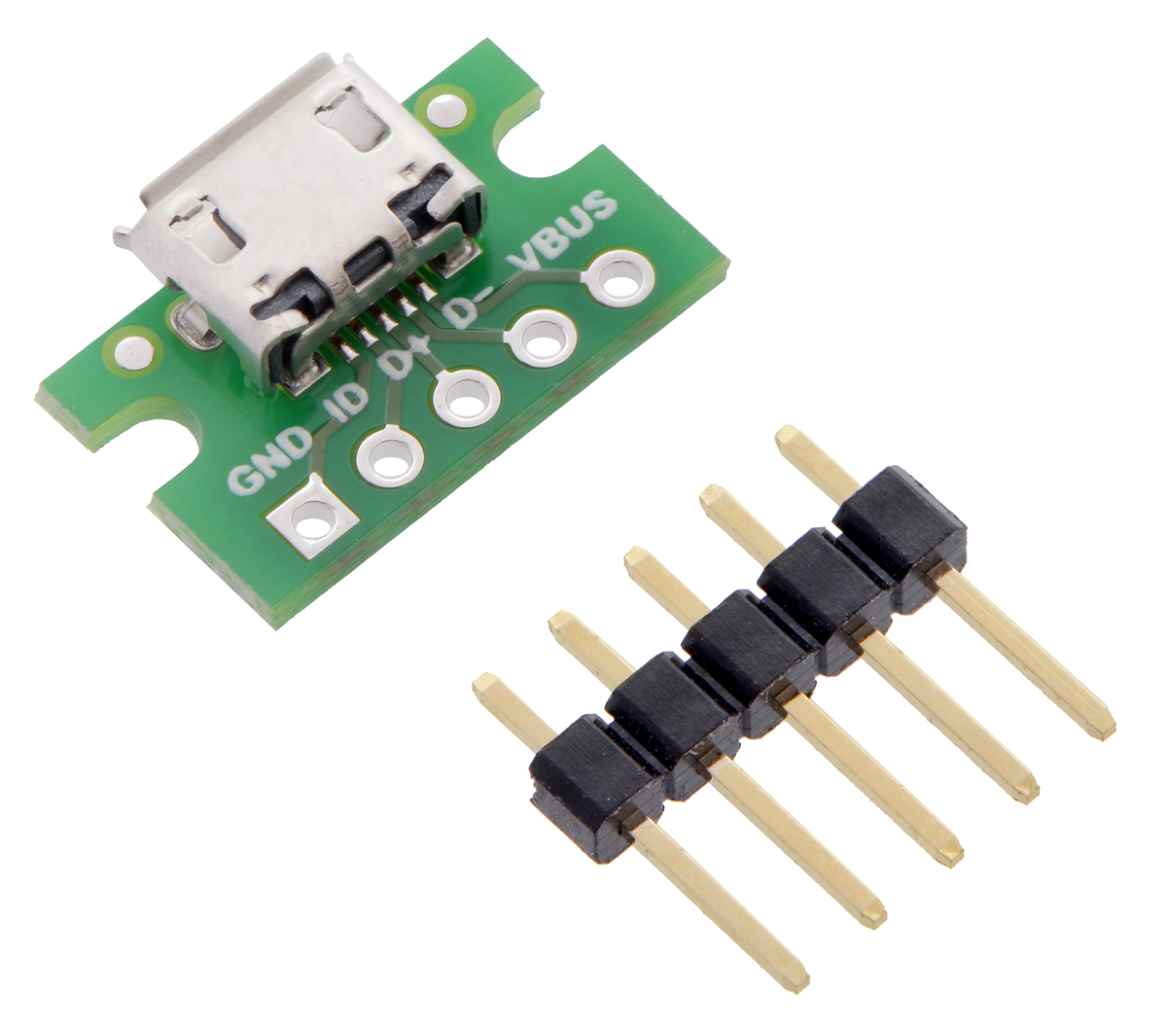 |
We’ve updated our USB Micro-B Connector Breakout Board with some minor improvements that should make it a little nicer to work with.
On the original version, the mounting cutouts didn’t work as well as we wanted: they were shallow, and the board was often prone to slipping out of place between two screws. The new version is wider and its cutouts are deeper to allow for more secure mounting, and it is slightly shorter in the other direction (0.4″ × 0.6″ with the connector).
For more information, see the board’s product page.
Related products

New 12 V micro metal gearmotors
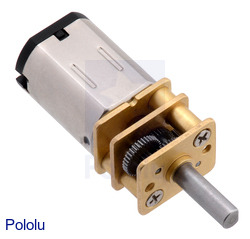
Our micro metal gearmotors are now available in 12 V versions! These high-power motors have long-life carbon brushes (HPCB) and offer the same performance as the 6 V HPCB motors at their respective nominal voltages; the only difference is that the 12 V motor draws half the current at twice the voltage.
The new 12 V gearmotors are available across our usual range of 11 gear ratios and in single- and dual-shaft versions. Along with our existing selection of micro metal gearmotors, this brings the total number of unique options available to 107:
| Rated Voltage |
Motor Type | Stall Current @ Rated Voltage |
No-Load Speed @ Rated Voltage |
Approximate Stall Torque @ Rated Voltage |
 Single-Shaft (Gearbox Only) |
 Dual-Shaft (Gearbox & Motor) |
|---|---|---|---|---|---|---|
| 12 V | high-power, carbon brushes (HPCB) |
800 mA | 6000 RPM | 2 oz-in | 5:1 HPCB 12V | 5:1 HPCB 12V dual-shaft |
| 3000 RPM | 4 oz-in | 10:1 HPCB 12V | 10:1 HPCB 12V dual-shaft | |||
| 1000 RPM | 9 oz-in | 30:1 HPCB 12V | 30:1 HPCB 12V dual-shaft | |||
| 625 RPM | 15 oz-in | 50:1 HPCB 12V | 50:1 HPCB 12V dual-shaft | |||
| 400 RPM | 22 oz-in | 75:1 HPCB 12V | 75:1 HPCB 12V dual-shaft | |||
| 320 RPM | 30 oz-in | 100:1 HPCB 12V | 100:1 HPCB 12V dual-shaft | |||
| 200 RPM | 40 oz-in | 150:1 HPCB 12V | 150:1 HPCB 12V dual-shaft | |||
| 140 RPM | 50 oz-in | 210:1 HPCB 12V | 210:1 HPCB 12V dual-shaft | |||
| 120 RPM | 60 oz-in | 250:1 HPCB 12V | 250:1 HPCB 12V dual-shaft | |||
| 100 RPM | 70 oz-in | 298:1 HPCB 12V | 298:1 HPCB 12V dual-shaft | |||
| 32 RPM | 125 oz-in | 1000:1 HPCB 12V | 1000:1 HPCB 12V dual-shaft | |||
Independence Day weekend sale

In celebration of Independence Day (July 4th), we are discounting selected products by up to 25% and offering an upgrade to the next best price break for everything else in our store. Please note that we will be closed Monday, so orders will not ship until Tuesday, July 5.
For more information, including all the discount coupon codes, see the sale page.
 |
Happy 4th of July!
Pololu ball casters used as "feet" for quadcopter
 |
One of our customers, Jeff, found a creative way to use some of our 1″ ball casters. He was having a problem with the legs of his quadcopter “grabbing” when he landed, so he attached a ball caster to the end of each leg. You could read more about his modification and find more pictures of his quadcopter in his post on the RCGroups.com forum.
Related products

Memorial Day weekend sale

We are having a big Memorial Day sale now through Monday, with discounts on over 800 products when you use the coupon code MEMORIALDAY16. Stock up on robot parts now so you can build cool things all summer long! Note that we will be closed on Monday, so orders will not ship until Tuesday, May 31.
For more information, including all of the sale items, see the sale page.
New product: Raspberry Pi 3 Model B
 |
We are now offering the Raspberry Pi 3 Model B. The Raspberry Pi is a popular credit card-sized computer that can run ARM Linux distributions. As the successor to the Raspberry Pi 2 Model B, the Pi 3 has a more powerful processor and adds wireless connectivity. Here are the specific improvements:
- 1.2 GHz 64-bit quad-core ARMv8 CPU
- 802.11n Wireless LAN
- Bluetooth 4.1
- Bluetooth Low Energy (BLE)
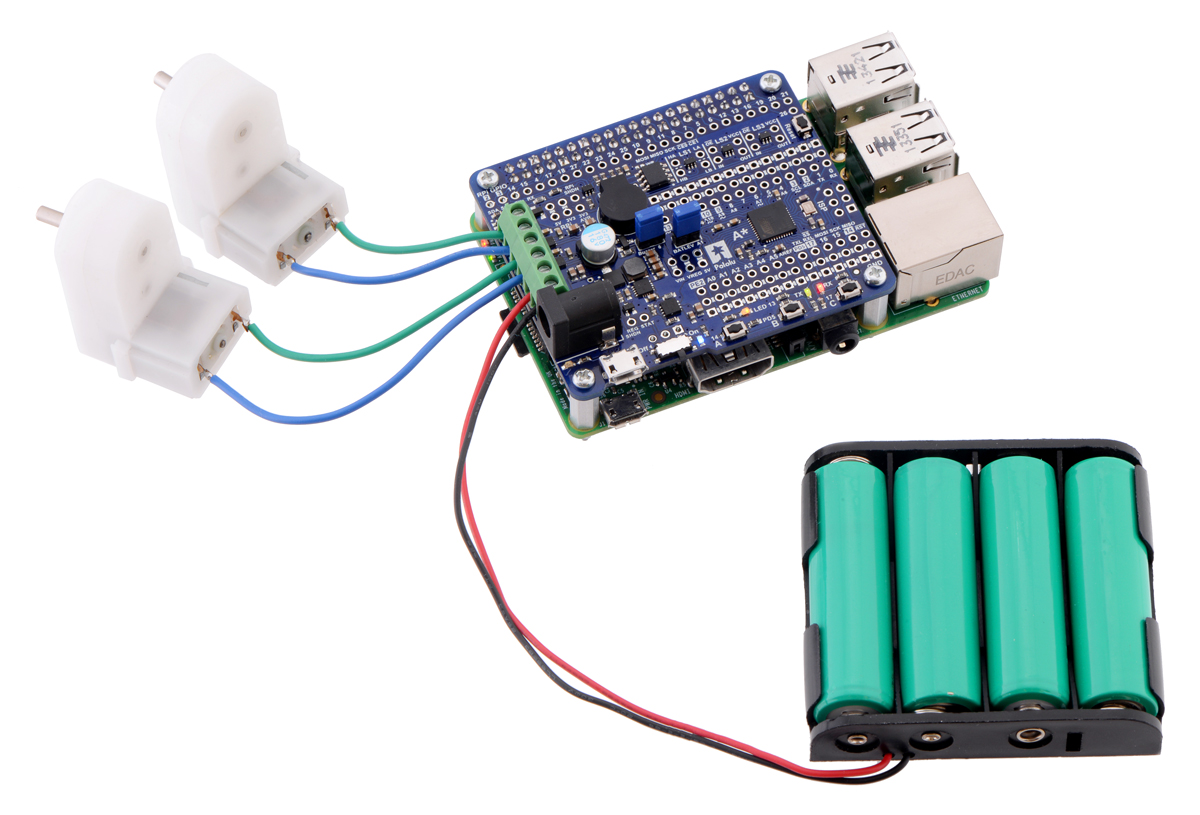
Along with these improvements, the Raspberry Pi 3 maintains compatibility with and the form factor of the previous Pi 2 (and Pi 1 Model B+). With its 0.1″-spaced GPIO header and small size, the Raspberry Pi also works as a programmable controller in a wide variety of robotics and electronics applications. It can also be combined with our A-Star 32U4 Robot Controller LV with Raspberry Pi Bridge to make a great controller for a small robot. We also carry a selection of Raspberry Pi expansion boards.
|
|
This comparison chart can help in selecting the right Raspberry Pi for your project:
 Raspberry Pi Model A+ 512MB |
 Raspberry Pi Model B+ |
 Raspberry Pi 2 Model B |
 Raspberry Pi 3 Model B |
 Raspberry Pi 3 Model B+ |
|
|---|---|---|---|---|---|
| CPU: | BCM2835 | BCM2836 | BCM2837 | BCM2837B0 | |
| CPU cores: | 1 | 4 | |||
| CPU speed: | 700 MHz | 900 MHz | 1.2 GHz | 1.4 GHz | |
| RAM: | 512 MB | 512 MB | 1 GB | ||
| Ethernet: | No | Yes | |||
| WiFi: | No | 2.4 GHz 802.11n | 2.4 GHz 5 GHz 802.11b/g/n/ac | ||
| Bluetooth: | No | 4.1 | 4.2 | ||
| Bluetooth Low Energy: | No | Yes | |||
| HDMI: | Yes | ||||
| Analog video: | Yes1 | ||||
| SD socket: | microSD | ||||
| Onboard regulators: | switching | ||||
| Expansion header pins: | 40 | ||||
| USB ports: | 1 | 4 | |||
| Mounting holes: | 4 | ||||
| Dimensions2: | 2.5″ × 2.2″ × 0.47″ | 3.35″ × 2.2″ × 0.8″ | |||
| Weight3: | 23 g | 42 g | 50 g | ||
1 Audio and analog video provided by a single four-pole 3.5 mm jack. This 3.5 mm jack also has its own dedicated low-noise power supply for improved audio.
2 Length and width measurements are for the PCB only; several of the connectors extend past the edge of the board.
3 Weight does not include microSD cards.
Related products

Tru.D 3D
 |
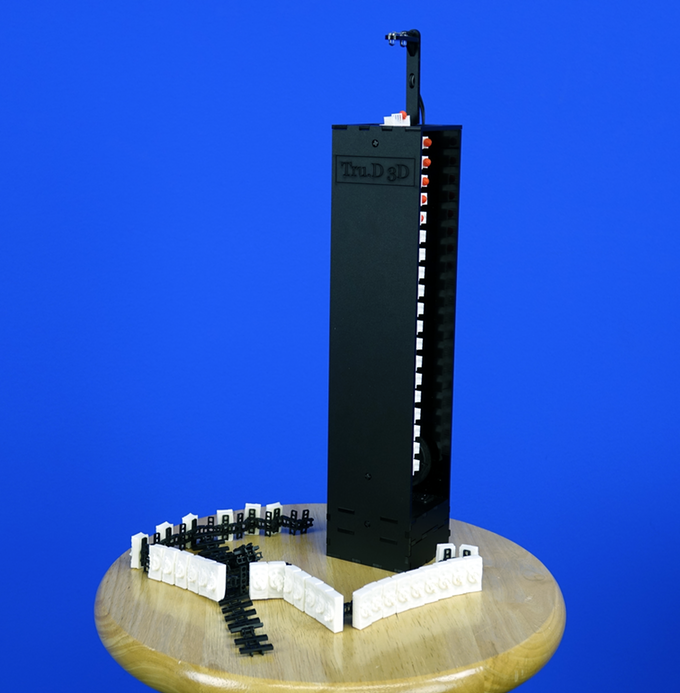
On Monday, Colin McGinn launched a Kickstarter in order to create a 3D short film using Tru.D 3D, which is a volumetric display system that he designed and patented. The system quickly feeds 3D volumetric objects into a specific viewing area, and each 3D piece forms a frame of an animation to tell a story that can be viewed from any angle.
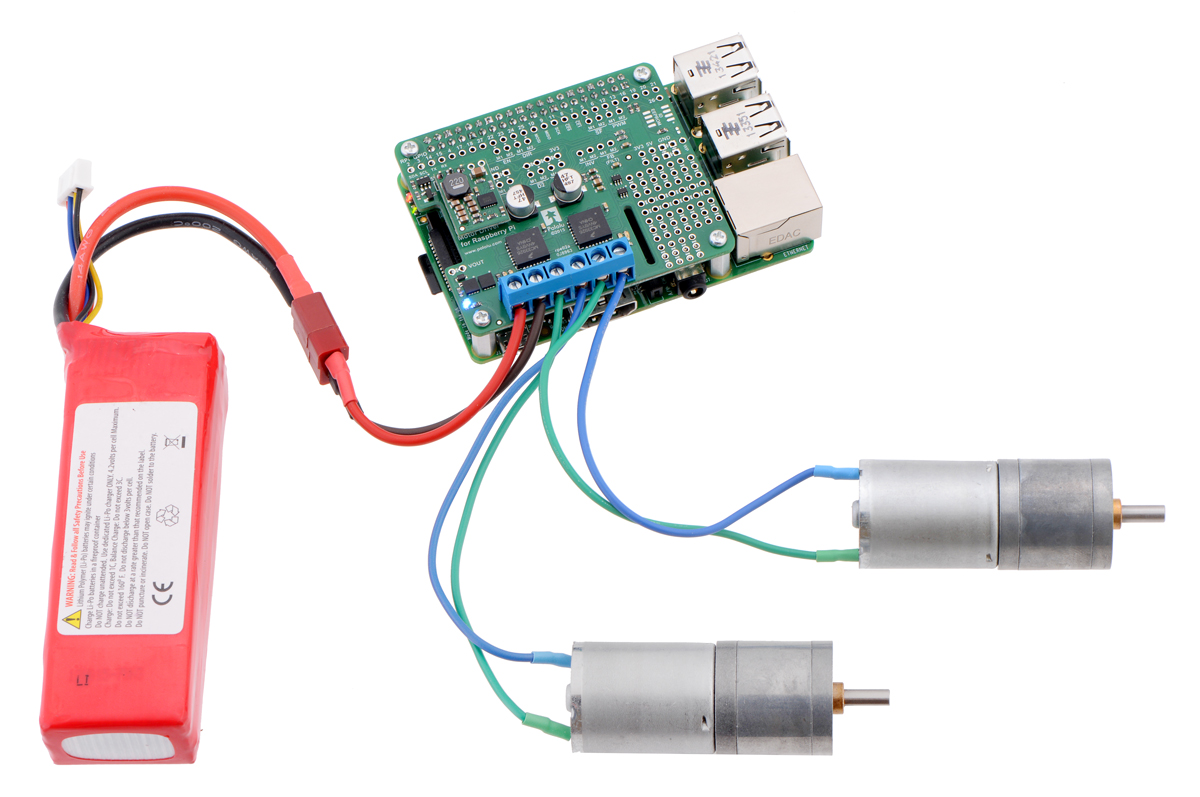
Included among the Kickstarter rewards is a mini Tru.D 3D machine, which uses our micro metal gearmotors and magnetic encoders to perform a short, two-second animation. The machine is small enough to hold in your hands, and backers have the option of choosing from one of three different animations.
 |
You can find more information on Colin’s project, including the full digital version of the short film, on his Kickstarter.

Sixteen new micro metal gearmotor versions!
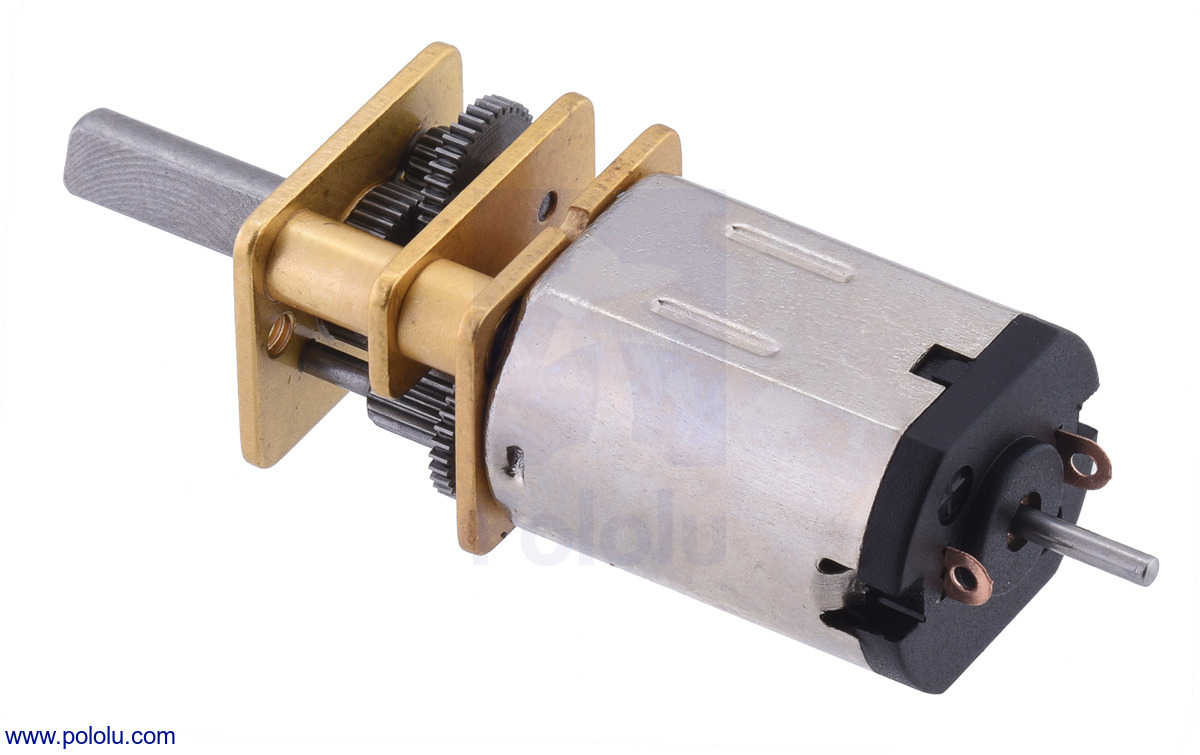 |
We just added 16 new micro metal gearmotors to our already huge selection, including three totally new MP (medium power) gear ratios: 5:1 MP, 210:1 MP, and 250:1 MP. With these new additions, we now have dual-shaft versions available in any combination of our 11 gear ratios and four motor types, giving you 44 different options that work with encoders like our magnetic encoder pair kit.
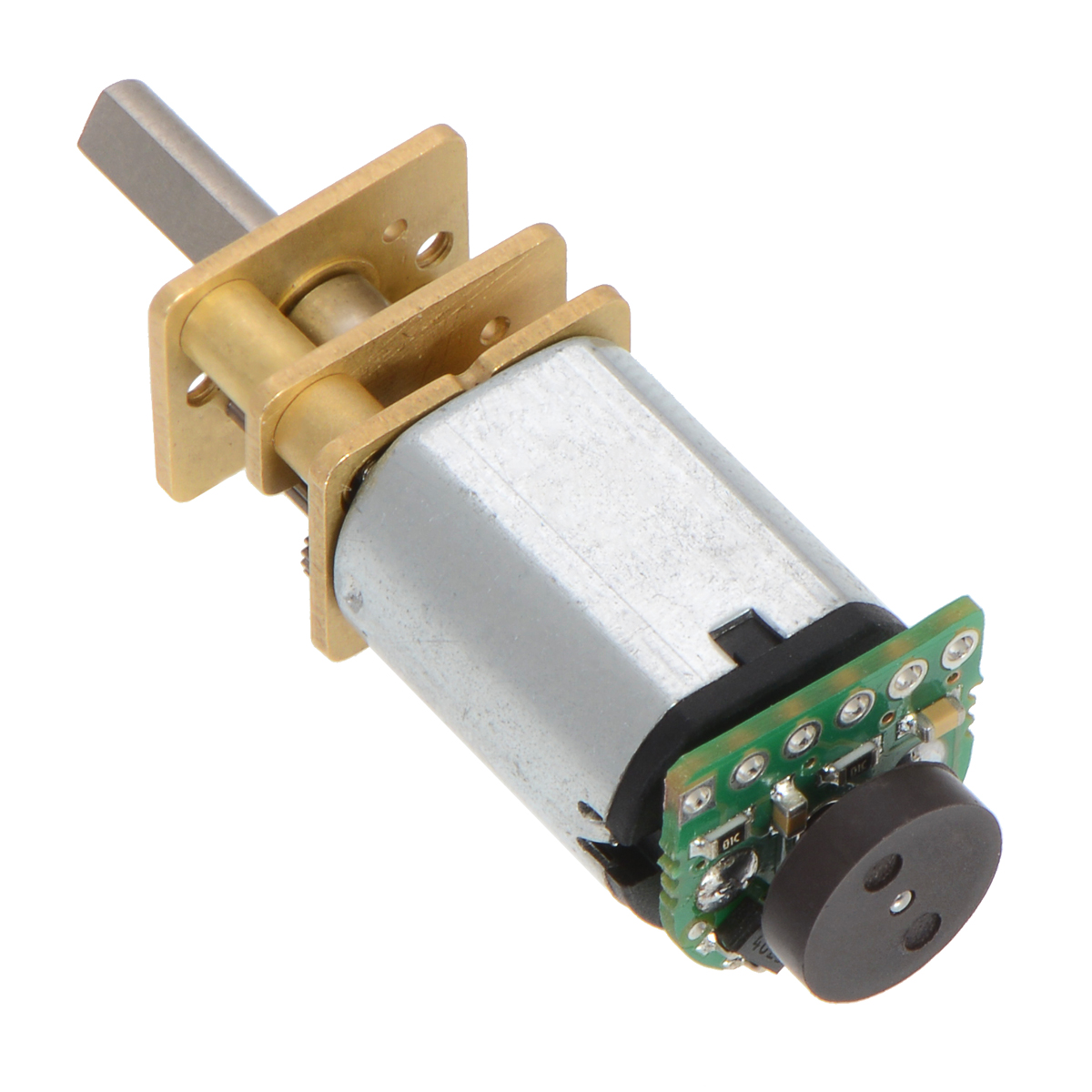 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled on a micro metal gearmotor with extended motor shaft. |
|---|
In all, this increases our total selection of micro metal gearmotors to 85 unique options:


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation









