Pololu Blog » User Profile: nathanb »
Posts by nathanb
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Animatronic tentacle mechanism using Pololu Universal Mounting Hubs
|
|

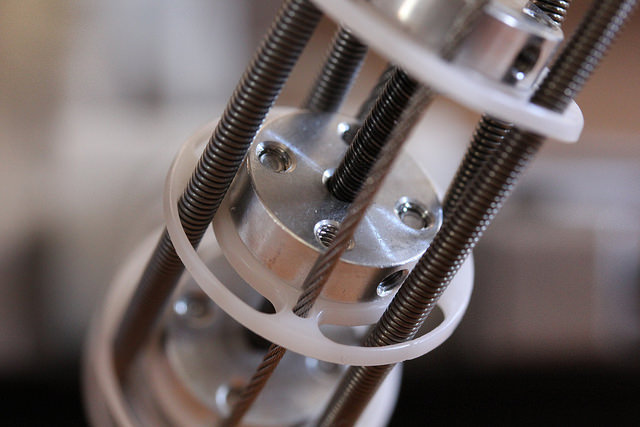
While our Universal Mounting Hubs are mainly intended as general-purpose adapters for motor shafts, it seems that they can also be used to help build a cable-actuated animatronic tentacle. Joshua Vasquez posted an article on Hackaday about his two-stage tentacle mechanism with “vertebrae” made from Universal Mounting Hubs and laser-cut Delrin pieces. (We didn’t do the laser cutting for this project, but our custom laser cutting service might be interesting for anyone wanting to make similar parts.) If you want to simultaneously impress and creep out your friends this Halloween, this seems like an interesting project to try!
Read more about Joshua’s project on Hackaday.
Related products


Maestro automated observatory

Our customer Robert sent us this spectacular image of NGC 1073 from his backyard observatory after we helped him get a SPDT Relay Carrier working with his Mini-Maestro 18-Channel servo controller. We thought it was pretty cool, so we asked him a bit more about how he captured it and how he is using the Maestro in his observatory. Continued…
Nathan's line following robot: Suckbot

After branching off into maze solving, pushing into sumo, and finding our way through dead reckoning, we circled back and had another line following competition at LVBots. I started designing the Suckbot before the previous line following competition over a year before this one, but the design dragged on and there was no urgent push to get it finished without another competition. The robot is designed to suck itself down to the course so it can go faster. I was able to get it following lines and sucking, and I managed to post some middle-of-the-pack lap times, but there was some unexpected behavior when tuning the PID parameters just before the competition, and I think there’s quite a bit of room for improving the robot’s performance in the future. Continued…


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation









