Motion Control Modules » Brushed DC Motor Controllers » Pololu Jrk Motor Controllers with Feedback »
Jrk 21v3 USB Motor Controller with Feedback

The Jrk 21v3 motor controller is a highly configurable brushed DC motor controller that supports four interface modes: USB, logic-level serial, analog voltage, and hobby radio control (RC). The controller can be used with feedback for closed-loop speed or position control, or it can be used without feedback as an open-loop speed control. The continuous output current is approximately 3 A in the recommended operating range of 8 V to 28 V, with derated performance down to 5 V and transient protection to 40 V. This version ships with connectors included but not soldered in, allowing for custom installations.
Alternatives available with variations in these parameter(s): version Select variant…
 Compare all products in Pololu Jrk Motor Controllers with Feedback.
Compare all products in Pololu Jrk Motor Controllers with Feedback.
| Description | Specs (16) | Pictures (23) | Resources (11) | FAQs (2) | On the blog (4) |
|---|
|
Pololu Jrk 21v3 USB motor controller. |
|---|
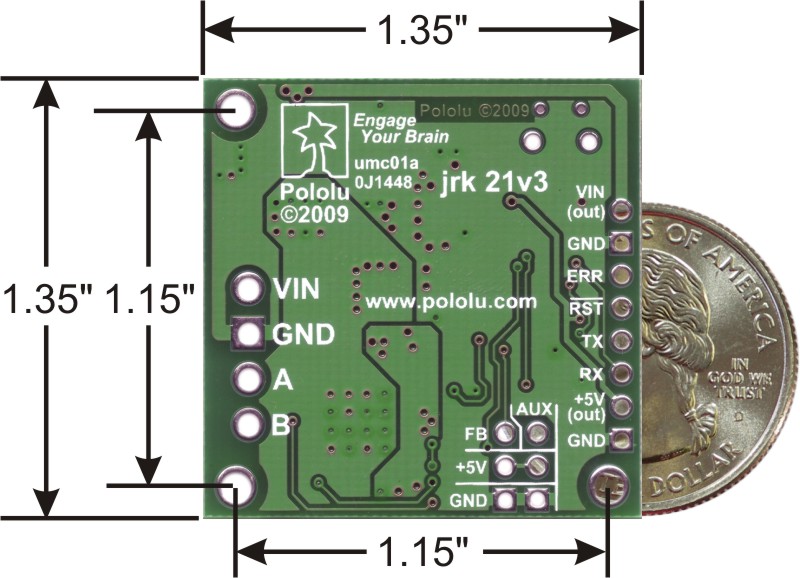 |
Pololu Jrk 21v3 USB motor controller with dimensions. |
|---|
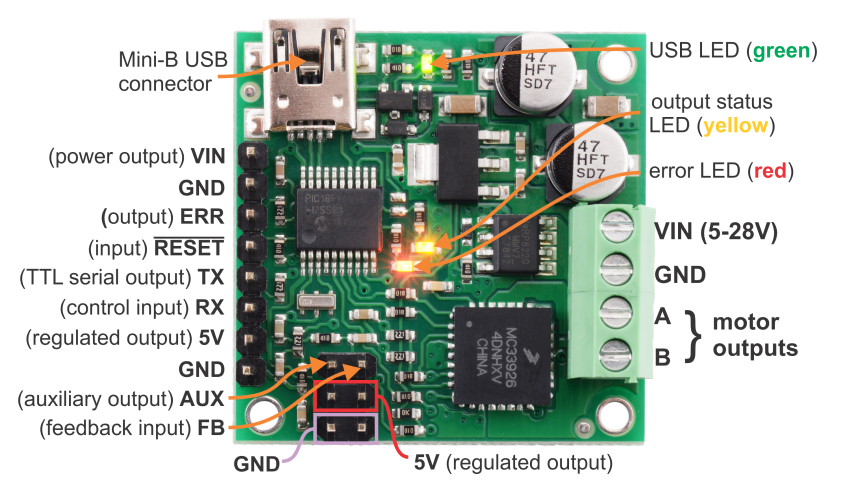 |
Pololu Jrk 21v3 USB motor controller with feedback, labeled top view. |
|---|
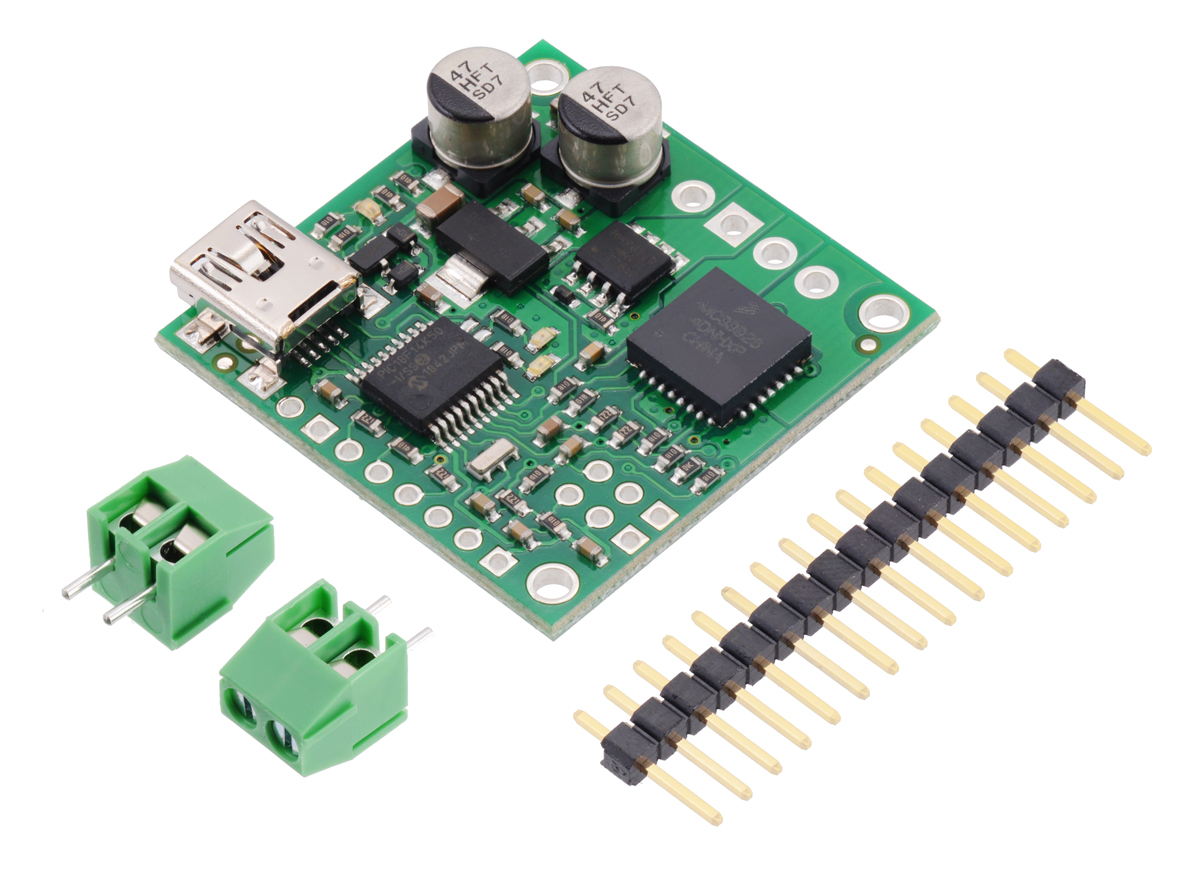 |
Pololu Jrk 21v3 USB motor controller with included hardware. |
|---|
 |
Pololu Jrk 21v3 USB motor controller with included hardware soldered in (fully assembled). |
|---|
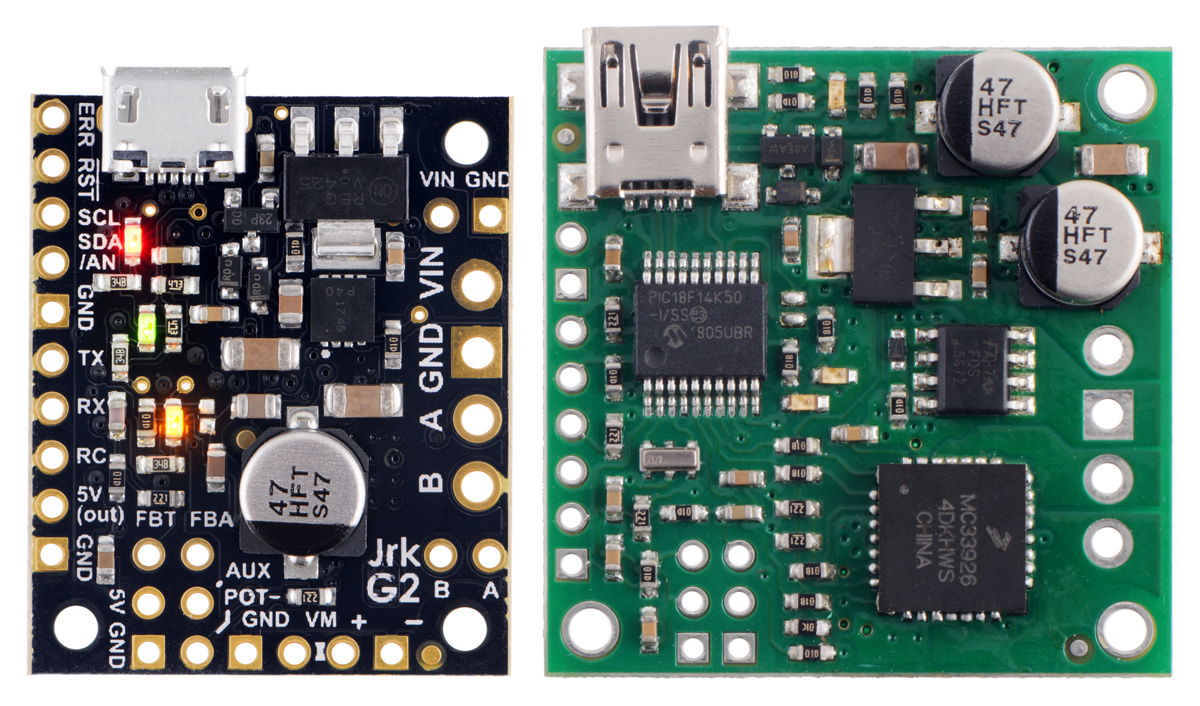 |
Comparison of the newer Jrk G2 21v3 (black PCB) with the original Jrk 21v3 (green PCB). |
|---|
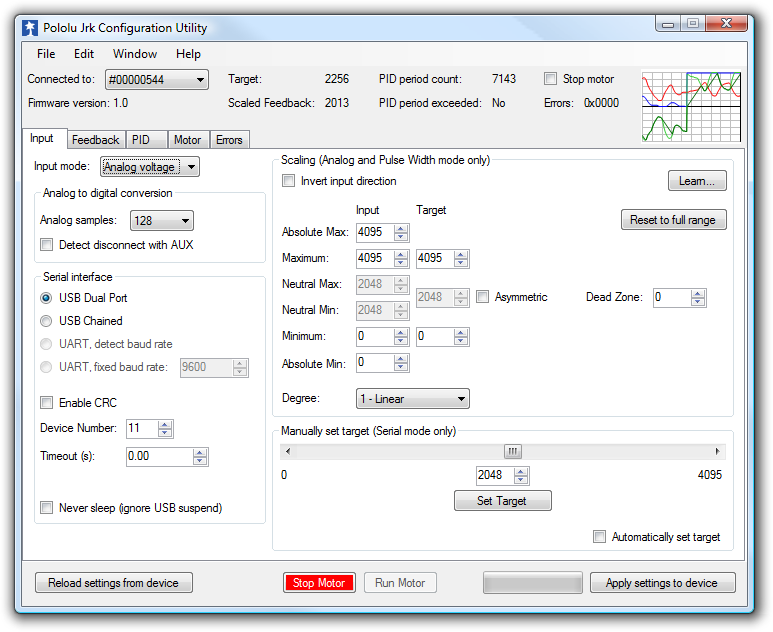 |
The Input tab of the Jrk Configuration Utility |
|---|
 |
The Feedback tab of the Jrk Configuration Utility |
|---|
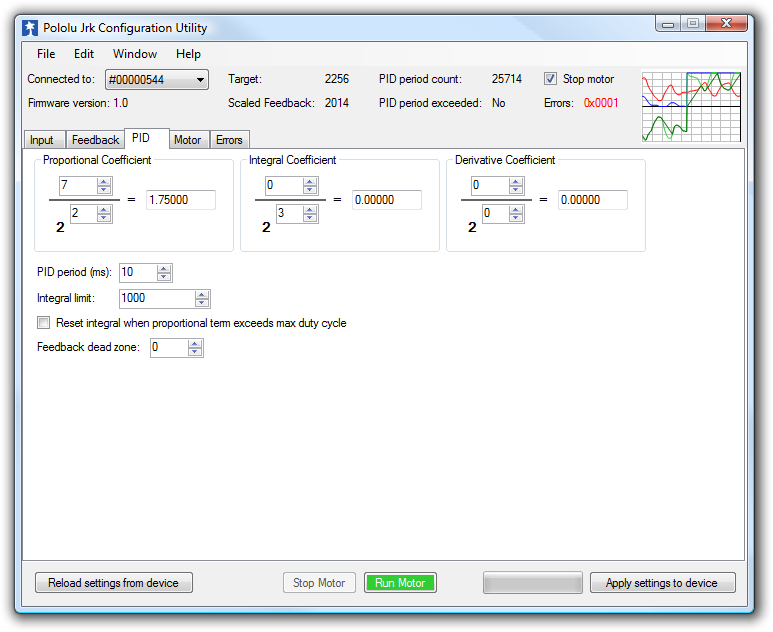 |
The PID tab of the Jrk Configuration Utility |
|---|
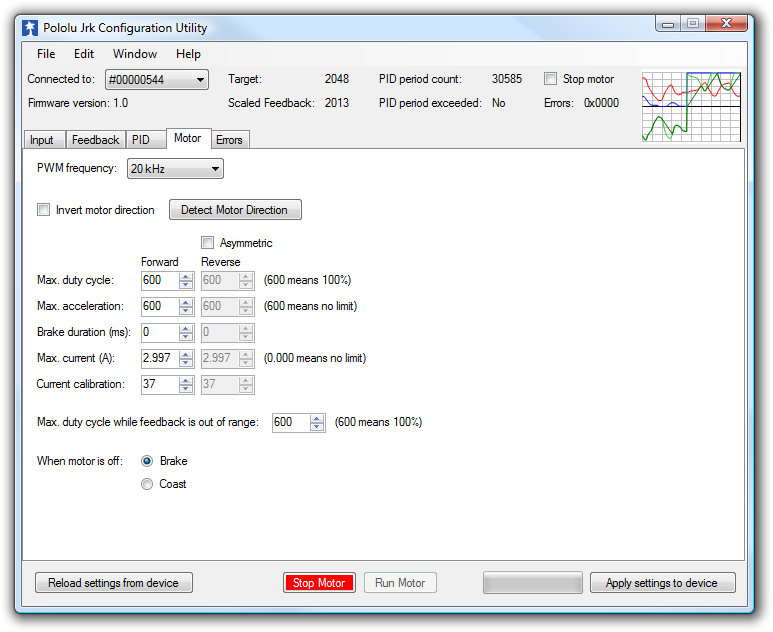 |
The Motor tab of the Jrk Configuration Utility |
|---|
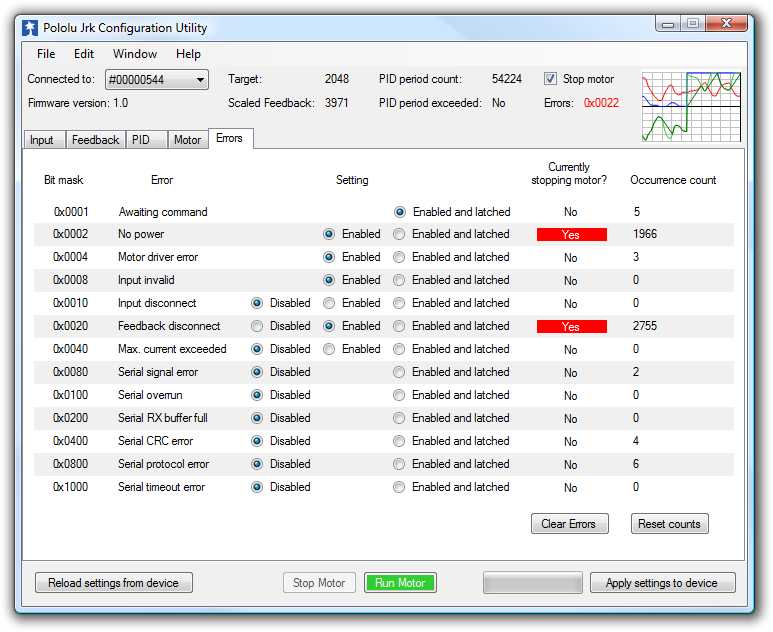 |
The Errors tab of the Jrk Configuration Utility |
|---|
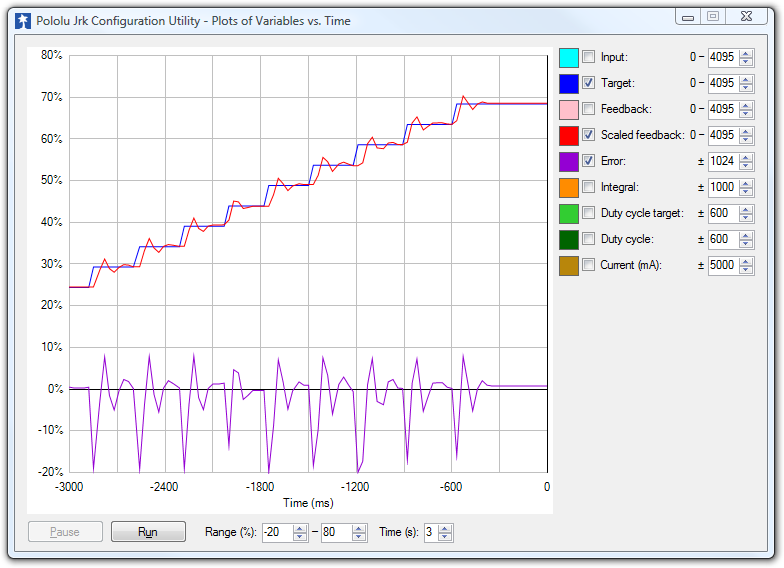 |
The Jrk plot window, showing overshooting (Derivative Coefficient = 0). |
|---|
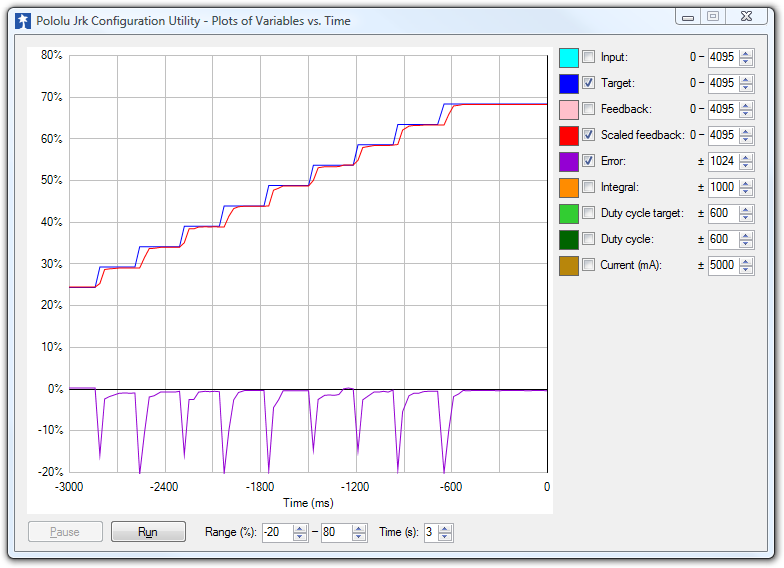 |
The Jrk plot window, showing undershooting (Derivative Coefficient = 10). |
|---|
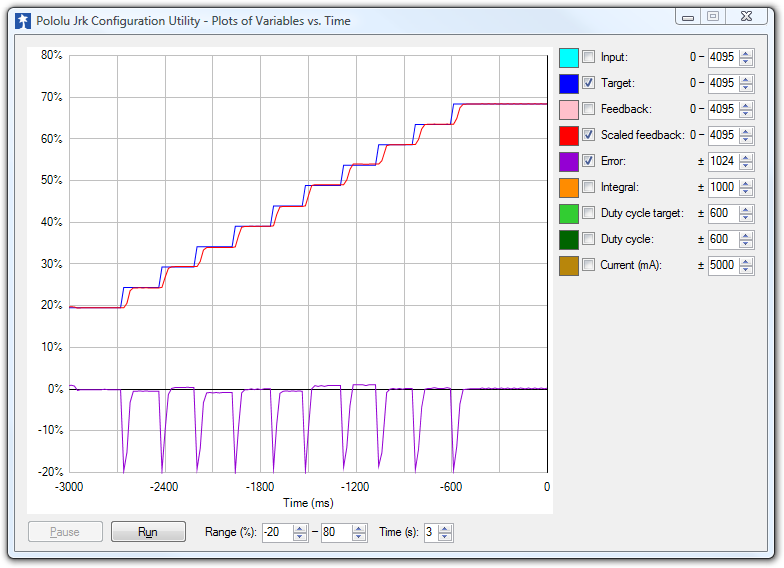 |
The Jrk plot window, optimized derivative term (Derivative Coefficient = 7.5). |
|---|
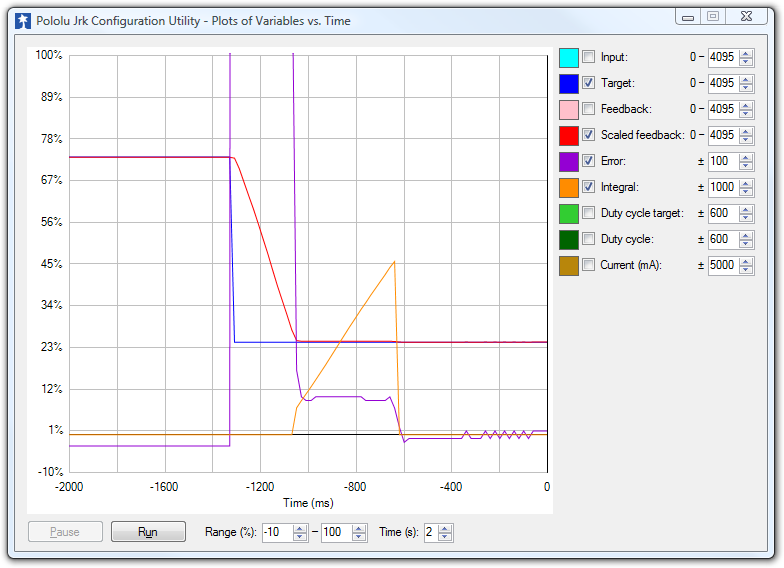 |
The Jrk plot window, showing how the integral term can reduce the error to near zero. |
|---|
 |
The Jrk plot window, showing all variables simultaneously. |
|---|
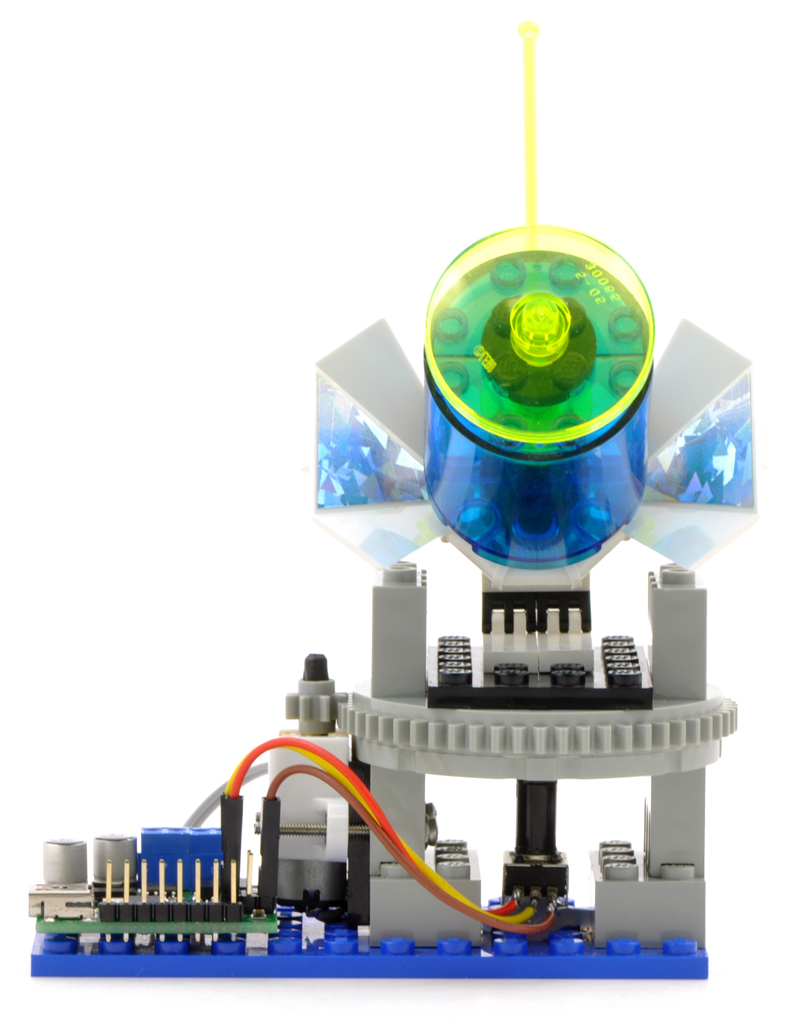 |
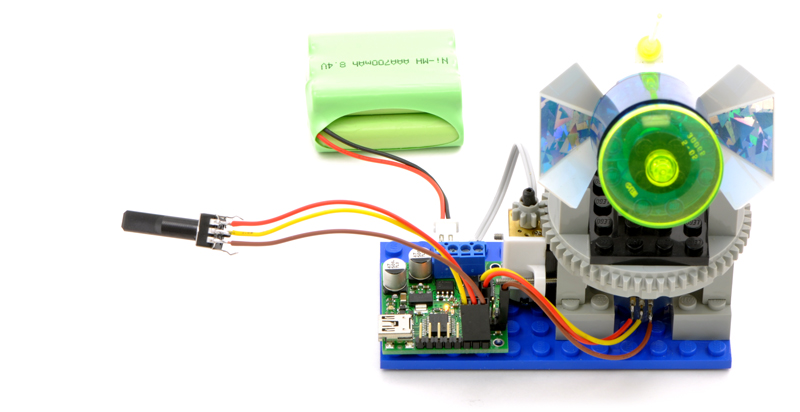
A basic feedback system controlling a LEGO turret with the Jrk 21v3, front view. |
|---|
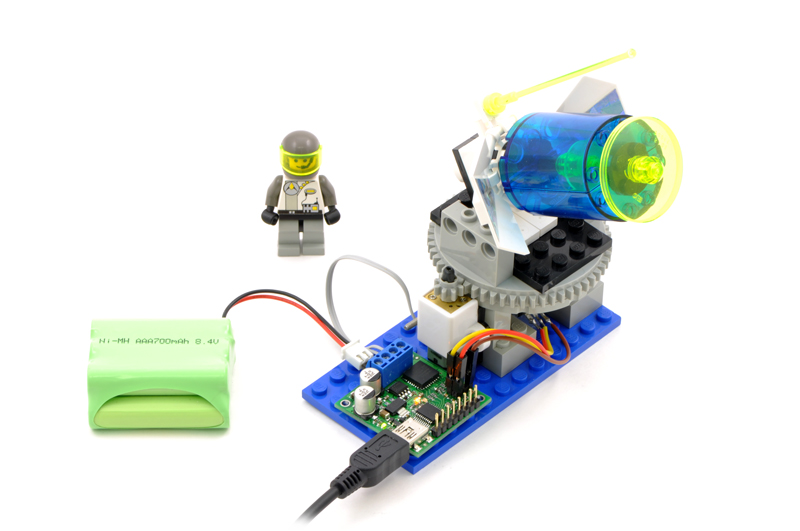 |
A basic feedback system controlling a LEGO turret with the Jrk 21v3. |
|---|
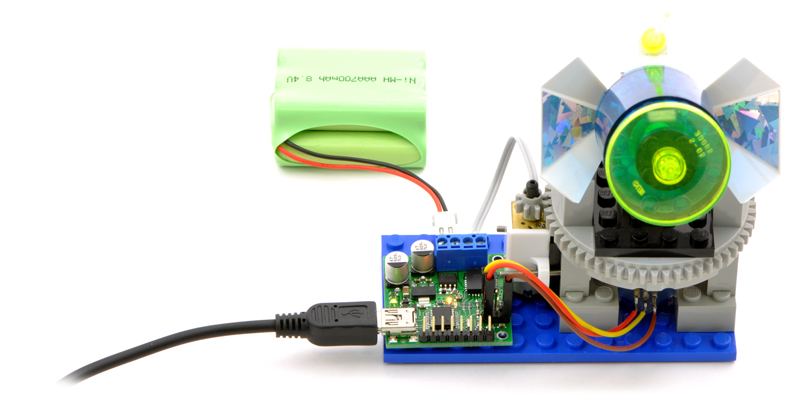 |
USB control. |
|---|
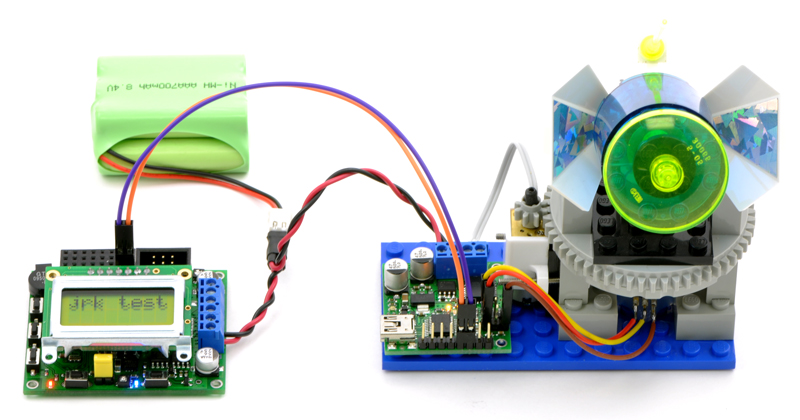 |
TTL serial control. |
|---|
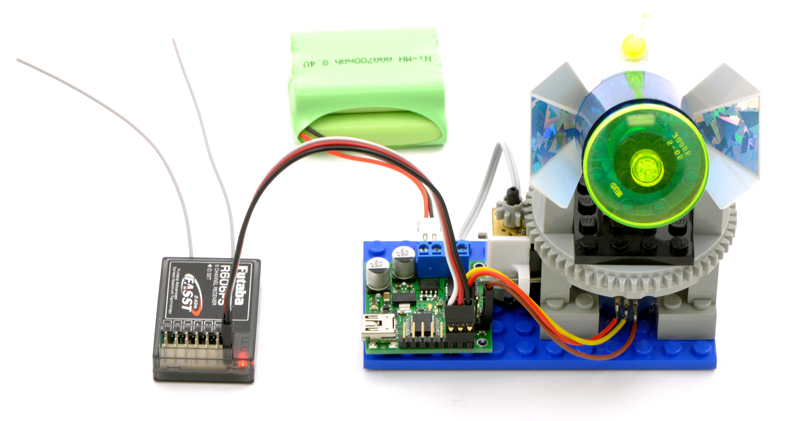 |
RC / pulse width control. |
|---|
 |
Analog control. |
|---|
 |
Connecting a linear actuator with feedback to a Jrk 21v3 motor controller. |
|---|
Related products

























Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
