Orangutan SVP Robot Controllers »
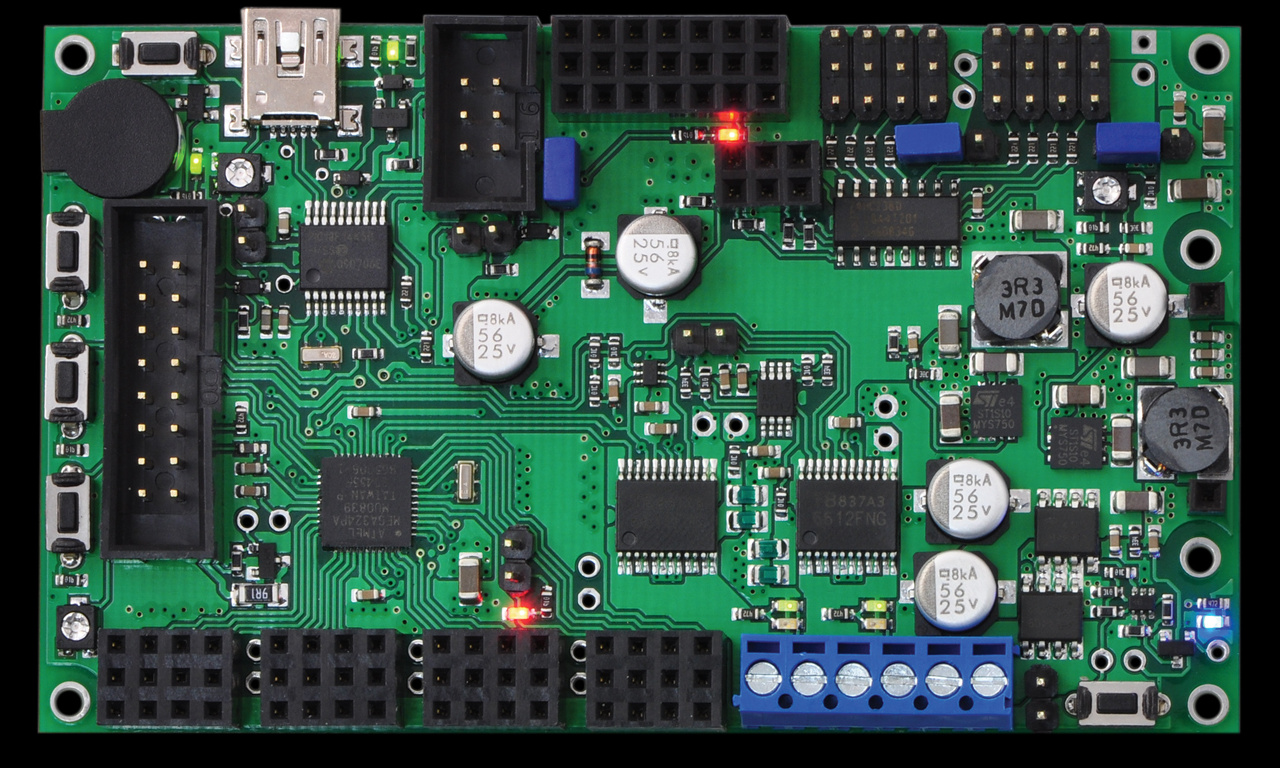
Orangutan SVP-1284 Robot Controller (assembled)

The Orangutan SVP-1284 robot controller is a super-sized version of our popular Orangutan SV, with a built-in AVR ISP programmer, more I/O lines, and more regulated power, and more memory. Based on the new ATmega1284P AVR microcontroller (128 KB flash, 16 KB RAM, 4 KB EEPROM) and featuring higher-power dual motor drivers (2 A continuous per channel), a bigger 16×2 LCD, and a demultiplexer for easy control of up to eight servos, the Orangutan SVP makes a great starting point for your robot or electronics project.
Alternatives available with variations in these parameter(s): processor Select variant…

| Description | Specs (18) | Pictures (5) | Resources (25) | FAQs (0) | On the blog (2) |
|---|
Documentation and other information
-

Pololu Orangutan SVP User’s Guide (Printable PDF)
User’s guide for the Pololu Orangutan SVP-324 and SVP-1284 robot controllers (both assembled and partial-kit versions).
-

Pololu AVR Programming Quick Start Guide (Printable PDF)
This guide explains how to get started programming your Orangutan or 3pi Robot in Windows, Linux or Mac OS X. It covers setting up an AVR development environment (Atmel Studio for Windows users), installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
-

Pololu AVR C/C++ Library User’s Guide (Printable PDF)
Information about installing and using the C/C++ libraries provided for use with Pololu products.
-
Pololu AVR Library Command Reference (Printable PDF)
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.
-
Programming Orangutans and the 3pi Robot from AVR Studio 4
Guide for programming Orangutans and the 3pi robot from the Atmel’s older AVR Studio 4 IDE. It covers installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
File downloads
-
Pololu AVR Development Bundle for Windows (12MB exe)
This bundle contains all the Pololu software you need to get started programming AVRs in Windows: the Pololu AVR C/C++ Library, the Pololu USB AVR Programmer drivers and software, and the Pololu Orangutan SVP drivers. We recommend installing Atmel Studio 7.0 before installing this bundle.
-
Orangutan SVP Drivers for Windows (version 121115) (53k exe)
This executable installer contains the drivers you need to use the Orangutan SVP in Windows.
-
Orangutan SVP Reference Diagram (82k pdf)
This printable quick-reference diagram identifies all the interactive components on the Orangutan SVP, including the pins, pots, LEDs, and pushbuttons.
-
Orangutan SVP Schematic Diagram (99k pdf)
-
Sample AVR Studio 4 project for the ATmega324PA to blink an LED (7k zip)
This is a sample AVR Studio 4 project that will blink an LED on an Orangutan SVP-324.
-
Sample AVR Studio 4 project for the ATmega1284P to blink an LED (8k zip)
This is a sample AVR Studio 4 project that will blink an LED on an Orangutan SVP-1284.
-
Toshiba TB6612FNG motor driver datasheet (308k pdf)
-
Orangutan SVP guia de usuario (2MB pdf)
A Spanish version of the Orangutan SVP robot controller user’s guide, provided by customer Jaume B.
-
Orangutan SVP desktop background, 1280×768 (438k jpg)
-
Orangutan SVP desktop background, 1280×768, no LCD (521k jpg)
-
LSM303DLM Orangutan example project (5k zip)
This sample program shows how to use an LSM303DLM 3D compass and accelerometer carrier with an Orangutan robot controller to build a tilt-compensated digital compass. The AVR Studio project is set up for an ATmega328P microcontroller, but it will work on other Orangutans with simple changes to the project configuration.
Recommended links
-
WinAVR
A free, open-source suite of development tools for the AVR family of microcontrollers, including the GNU GCC compiler for C/C++.
-
AVR Studio 4
The older version of Atmel’s free integrated development environment (IDE) for AVRs, which is no longer supported by Atmel.
-
ATmega324PA documentation
Microchip’s product page for the ATmega324PA.
-
ATmega1284P documentation
Microchip’s product page for the ATmega1284P.
-
AVR Libc Home Page
The web site for AVR Libc, which is the standard library of functions that you can use with C and C++ on the AVR.
-
GCC, the GNU Compiler Collection
Documentation for GCC, including the AVR GCC C/C++ compilers.
-
Pololu A-Star and Orangutan Forum Section
The A-Star and Orangutan discussion section of the Pololu Robotics Forum.
-
AVR Freaks
AVR community with forums, projects, and AVR news.
-
Orangutan SVP on RoboRealm
RoboRealm provides an AVR program that can be installed on the Orangutan SVP, which makes many features of the Orangutan SVP available through RoboRealm’s graphical user interface.

Related products

























Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation

{kind=link}
{kind=link}