Support » Pololu RC Switch User’s Guide » 6. Pololu 4-Channel RC Servo Multiplexer »
6.1. Components of the 4-Channel RC Servo Multiplexer
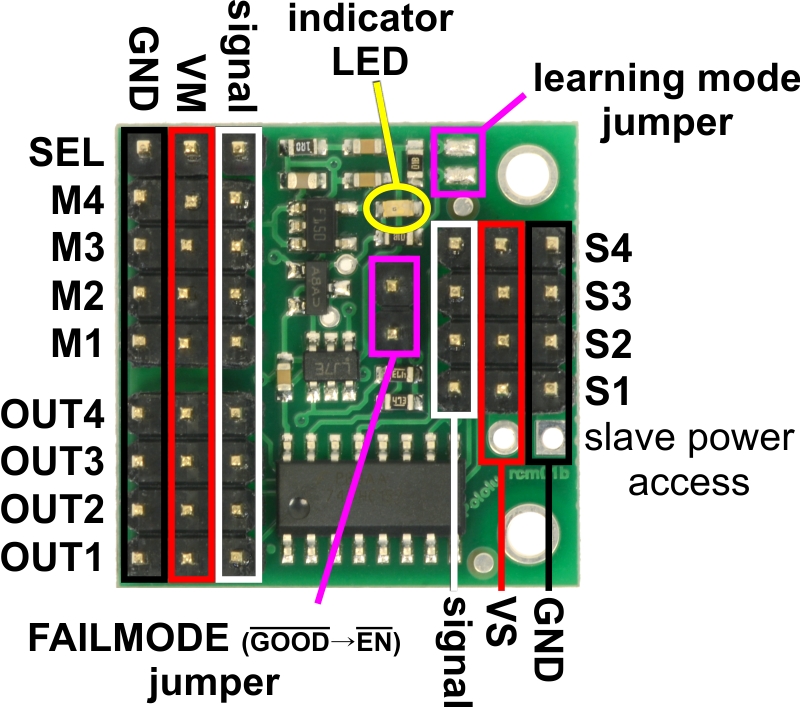 |
Pololu 4-Channel RC Servo Multiplexer (Assembled), labeled pinout. |
|---|
RC interface
The Pololu 4-Channel RC Servo Multiplexer has a total of 13 RC servo channels:
- The four inputs M1–M4 are called the master inputs.
- The four inputs S1–S4 are called the slave inputs.
- The four outputs OUT1–OUT4 are the main outputs of the device.
- The signal on the SEL input channel determines whether the outputs map to the master inputs or the slave inputs.
This guide uses the terms active, activated, and activation to refer to the active state of the switch. For the RC multiplexer, active means that the outputs reflect the slave inputs. By default, the switch will not be active and the master inputs will show up on the outputs.
Each servo channel consists of three pins: GND, power, and signal. As shown in the diagram above, the GND (ground) pins are on the edge of the board and the power pins are in the middle between GND and signal. All ground pins are internally connected on the board.
When the RC signal on the SEL channel is lost or invalid, the optional FAILMODE jumper determines the output behavior. If the jumper is left off, the master inputs will be in control. If the jumper is connected, the output channels go low and stay low for as long as the signal on the SEL channel remains invalid. For many servos and electronic speed controls (ESCs), a constant low on the signal line will turn them off, which might be desirable if the control signals are known to be bad.
Note that SEL is the only input that requires a valid RC servo signal (10–330 Hz pulse rate, 0.5–2.5 ms pulse width); the master and slave inputs can be general digital signals. For example, you could use OUT4 to control the brightness of a small (< 20 mA) LED by sending PWM signals to the inputs on S4 and M4.
Power
The power supplied by the master RC device should be between 2.5 and 16 V, and it must be capable of supplying the current that the servos connected to the outputs draw. The power pins of the SEL, M1–M4, and OUT1–OUT4 channels are all connected to the same VM rail, and the board draws its power from those pins. The power pins of the S1–S4 inputs are connected to each other on the VS rail but are not used by the board.
Additional outputs and indicator LED
The yellow indicator LED indicates what state the switch is in. The LED behavior is described in Section 8.
The FAILMODE jumper consists of two pins that might be individually useful to advanced users:
- The FAILMODE pin with the octagonal pad (the one closer to the edge of the board) is the GOOD output. This output is low when signal on the SEL input is valid, and high when the signal on the SEL input is invalid or missing.
- The other FAILMODE pin is the EN input. This input is pulled low by default. When this input is driven high, it disables all of the output channels, causing them to go low (0 V) and stay low.
The RC multiplexer has an internal signal named OUT that indicates whether the switch is activated or not. The OUT signal is high when the switch is active and is low otherwise. This signal is not accessible on any through-hole pin but you can access it by finding the 16-pin chip and soldering a wire to the pin 1, which is the pin that is closest to the OUT1 channel.
When high, all the output signals on the device will output a voltage approximately equal to 5 V or VM, whichever is lower. When low, these outputs will be at 0 V (ground). These outputs do not have resistors in series with them. Each output can source or sink up to 25 mA.
Configuration interface
The learning mode jumper can be used to get the device into learning mode and configure it. The configuration procedure is described in Section 9.
 |
Pololu 4-Channel RC Servo Multiplexer, bottom view with dimensions. |
|---|
Included hardware
The Pololu 4-Channel RC Servo Multiplexer is available in two versions:
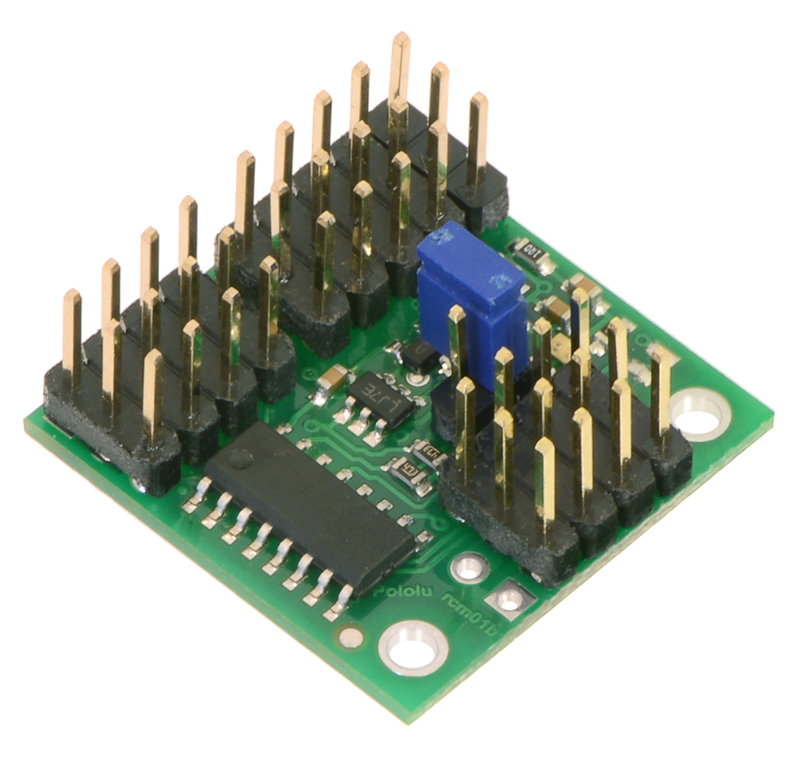
- The assembled version ships with the headers pins soldered in to every through-hole except the extra slave power connection pins, as shown in the left picture below. A shorting block is included for optional use with the FAILMODE jumper pins. The assembled version can be incorporated into an existing RC system without the need for any additional soldering. The header pin spacing is the same as on standard RC receivers, so the board works directly with standard hobby RC servos and servo cables.
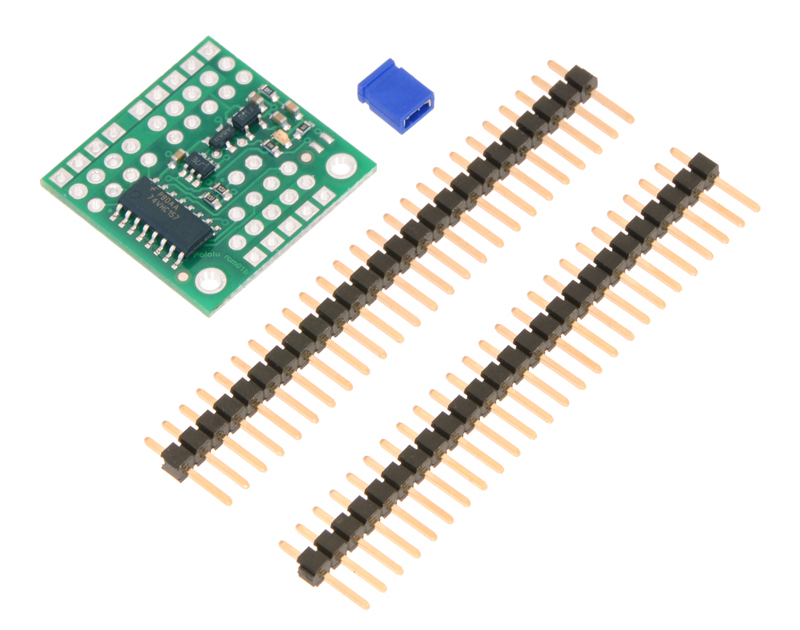
- The partial kit version gives you the flexibility to choose different connections. It includes a shorting block and two 1×25-pin male headers. These strips can be broken into smaller strips and soldered to the board, or wires can be soldered directly to the board for the most compact installation.
|
|
Related products









Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
