Support » Qik 2s12v10 User’s Guide » 3. Connecting the Qik »
3.a. Power and Motor Connections
 |
Power
The qik motor controller is powered via the large VIN and GND pads on the power side of the board (do not power the controller through the VIN and GND pads on the logic side of the board!), as shown in the picture above. The input voltage can be between 6 and 16 V and is the voltage that the motors will see. An integrated voltage regulator produces the 5 V that powers the board’s logic, so no separate logic power supply is necessary. Both the input voltage and regulated voltage can be accessed as outputs on the left side of the board (i.e. the logic connections). See Section 3.b for more information. Please ensure that your power source can supply the current your motors will draw.
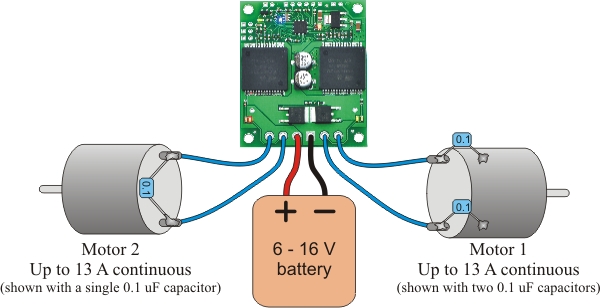 |
Qik 2s12v10 power and motor connections. |
|---|
Motors
The qik can independently drive up to two bidirectional brushed DC motors, referred to as M0 and M1. The two terminals of each motor should be connected to the qik as shown above. Variable speed is achieved with 7-bit or 8-bit pulse width modulated (PWM) outputs at one of several selectable frequencies. 7-bit control allows for PWM frequencies of 19.7 kHz, 2.5 kHz, and 310 Hz; 8-bit control allows for PWM frequencies of 9.8 kHz, 1.2 kHz, and 150 Hz. The highest achievable frequency of 19.7 kHz is ultrasonic, which can result in quieter motor control. Lower frequencies might make the motors louder, but they can help decrease power losses due to switching and affect the relationship between PWM duty cycle and motor RPM. The resolution and frequency can be set via the qik’s PWM configuration parameter (see Section 5.a).
The motor direction convention used in this document is that “forward” corresponds to holding the + output at VIN while PWMing the - output between ground and high impedance. “Reverse” is the same as forward but with the outputs flipped: - is held at VIN while + is PWMed between ground and high impedance. As a result, the motor is rapidly alternating between drive and coast when the direction is “forward” or “reverse”. Variable speed control is achieved by varying the fraction of the cycle that the motor outputs are driving. Full speed arises when the motor outputs are driving 100% of the time (one motor output is held at VIN and the other at ground). See Section 5.f for more information.
The qik 2s12v10 allows for variable braking. In this mode, the motor’s + and - outputs are PWMed between ground and high impedance. While the outputs are high-impedance, the motor coasts, and while the outputs are tied to ground the motor brakes. See Section 5.e for more information.
The qik 2s12v10 motor controller uses VNH2SP30 motor driver integrated circuits. These motor drivers have maximum current ratings of 30 A continuous, but the chips by themselves will overheat at lower currents (see the table below for typical values). The actual current the qik can deliver will depend on how well the motor drivers are kept cool. The qik’s printed circuit board is designed to draw heat out of the motor driver chips, but performance can be improved by adding a heat sink. In our single-driver tests, we were able to deliver 30 A for a fraction of a second and 20 A for several seconds without overheating the IC. At 6 A, the chip gets just barely noticeably warm to the touch. For high-current installations, the motor and power supply wires should also be soldered directly instead of going through the supplied terminal blocks, which are rated for up to 15 A.
- Time to overheat at 30 A: < 1 s
- Time to overheat at 20 A: 35 s
- Time to overheat at 15 A: 150 s
- Time to overheat at ≤ 13 A: N/A (does not overheat)
Note that these above times were obtained using only one driver with 100% duty cycle at room temperature without a heat sink. Drawing high currents from both drivers simultaneously could cause them overheat faster. Switching-induced power losses arising from duty cycles below 100% could also cause the drivers to overheat faster and lower the continuous current rating.
Related products



Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
