Support » PIC-Based, Obstacle-Avoiding Robot »
1. Introduction
 |
One of the biggest challenges in building your own robot is controlling its motors. You can find new or surplus motors and gearboxes in many places, and low-cost microcontrollers and books on how to use them abound. However, microcontrollers cannot directly drive DC motors, leaving robotics beginners with the possibly overwhelming challenge of building their own motor controller. This task is even more complicated if the motors require bidirectional operation and speed control.
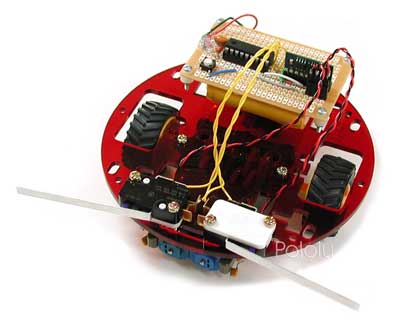
This project demonstrates how easy it is to make a simple robot controller using the Pololu micro dual serial motor controller with a Microchip PIC16F628 microcontroller. We then use the circuit with the Pololu robot chassis to create a small, obstacle-avoiding robot that can serve as a starting point for more advanced projects. The low-voltage operation of the motor controller allows a small, 3.6 V cordless telephone battery pack to power the entire robot. Since the motor controller only requires two of the PIC’s 13 I/O lines, there is plenty of opportunity for expansion.




Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
