Sensors » Proximity Sensors and Range Finders » Sonar Range Finders »
Maxbotix XL-MaxSonar-AE3 Sonar Range Finder MB1330

This ultrasonic (sonar) range finder features real-time automatic calibration and noise rejection resulting in virtually noise-free distance readings even in environments with changing acoustic and electrical noise. The sensor detects objects from 0 to 7.65 m (25 ft) and has a resolution of 1 cm (0.4") for distances beyond 20 cm (8"). The XL-MaxSonar works from 3.3 to 5V and peaks at only 0.5 W of power consumption.
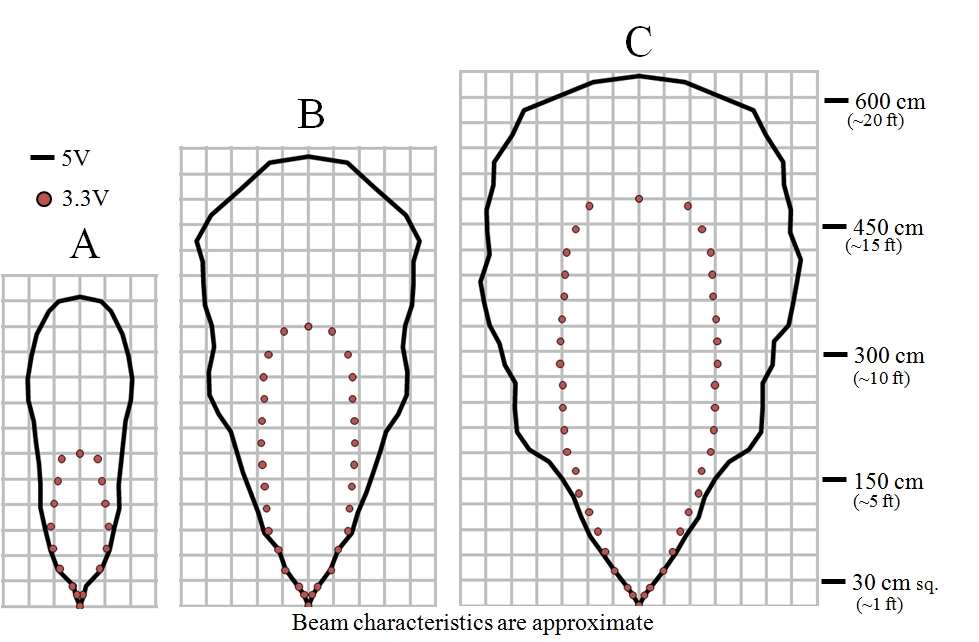
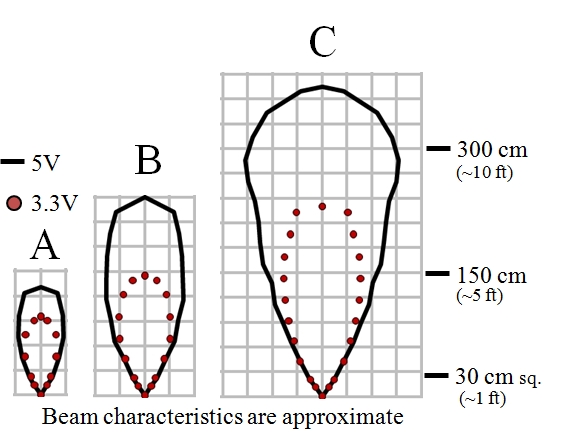
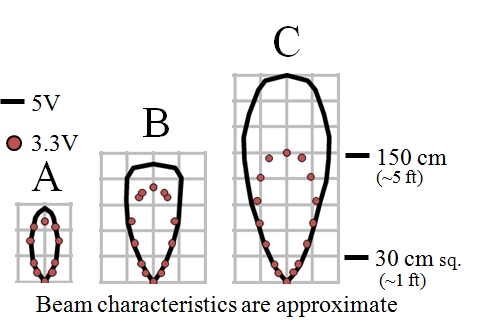
The EZ0 / AE0, EZ1 / AE1, EZ2 / AE2, EZ3 / AE3, and EZ4 / AE4 versions have progressively narrower beam angles.

| Description | Specs (10) | Pictures (6) | Resources (10) | FAQs (0) | On the blog (0) | Distributors (0) |
|---|
 |
MaxBotix ultrasonic sensor line comparison chart. |
|---|
Overview
The Maxbotics XL-MaxSonar family of sonar range finders offers very short- to long-range detection and ranging in an incredibly small package with low power consumption. The XL-MaxSonar detects objects from 0 to 7.65 meters (25 feet) and provides sonar range information beyond 20 cm (8") with a resolution of 1 cm resolution (0.4 in). Objects between 0 and 20 cm range as 20 cm. An efficient transformer uses 0.5 W of power to drive the transducer, yielding high-output acoustic power. This acoustic power, combined with continuously-variable gain, real-time automatic calibration, real-time waveform signature analysis, and real-time noise rejection algorithms, results in virtually noise-free distance readings for most applications, even in the presence of various acoustic or electrical noise sources. The XL-MaxSonar distance sensor is available in five factory-calibrated beam patterns (EZ/AE0-4).
For a less-expensive, lower-resolution, shorter-range version, please consider the LV-MaxSonar-EZ family of distance sensors.
Specifications and Features
- Small and light: 0.870" x 0.785" x 0.989" (2.2 x 2.0 x 2.5 cm), 0.22 oz (6.1 g)
- Long range detection: 0 – 7.65 m (25 ft)
- No dead zone; detections from 0 to 20 cm (8 in) are output as 20 cm
- Resolution of 1 cm (0.4 in)
- Low typical current consumption: 3.4 mA at 5 V, 2.1 mA at 3.3 V
- Runs on 3.3 – 5 V
- 42 kHz ultrasonic sensor
- 10 Hz reading rate
- Readings can be triggered externally or internally
- Supports three interfaces (all are active simultaneously):
- Serial output of distance reading: asynchronous, logic-level (TTL), inverted, 9600 bps 8N1
- Analog output of distance reading: (Vcc/1024) / cm (4.9 mV/cm when input voltage Vcc = 5 V)
- Pulse width output of distance reading: 58 μs/cm (147 μs/in) on EZ models only
- Analog voltage envelope of return acoustic wave form on AE models only
Selecting the right distance sensor
Since there are 15 members of the XL- and LV-MaxSonar acoustic distance sensor family, we recommend using the Maxbotix sonar range finder selection guide when choosing a acoustic range sensor for your application. There are 5 different beam configurations for the XL-MaxSonar family (EZ/AE0-4), each pictured below, and two output types: EZ and AE. Both models report a distance reading through an analog voltage output and a serial interface. The EZ models also report the distance reading as a high-accuracy digital pulse width, while the AE models report a real-time analog envelope of the detected acoustic reflections. The analog envelope is an time-varying analog signal representing the acoustic waveform received by the transducer. External processing of this analog envelope allows for the simultaneous detection of multiple objects at different distances. Please see the picture above for an example of the analog envelope output.
Maxbotix XL-MaxSonar-EZ0 / AE0 (MB1200 / MB1300) beam characteristics:
 |
Maxbotix XL-MaxSonar-EZ1 / AE1 (MB1210 / MB1310) beam characteristics:
 |
Maxbotix XL-MaxSonar-EZ2 / AE2 (MB1220 / MB1320) beam characteristics:
 |
Maxbotix XL-MaxSonar-EZ3 / AE3 (MB1230 / MB1330) beam characteristics:
 |
Maxbotix XL-MaxSonar-EZ4 / AE4 (MB1240 / MB1340) beam characteristics:
 |
Related products


















Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
