Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 7)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New products: right-angle female headers
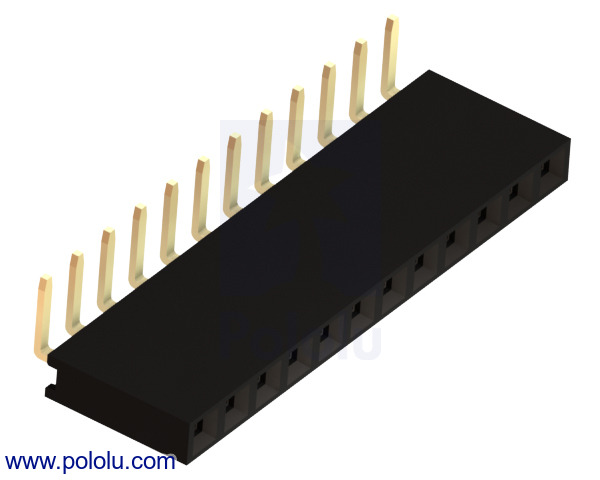 |
We are now carrying female 0.1" headers with right-angle pins, in sizes from 1×2 to 1×12. You can view these and other female header products on the category page.
Free Elektor magazine October 2013
 |
Get a FREE copy of Elektor magazine’s October issue with your order while supplies last. This offer is only available for orders shipped to USA or Canada. To get your free issue, enter the coupon code ELEKTOR1013 into your shopping cart. The magazine will add 6 ounces to the package weight when calculating your shipping options.
For other issues and more information, see our Free Elektor Magazine Offers page.
New product: RC Switch with Medium Low-Side MOSFET
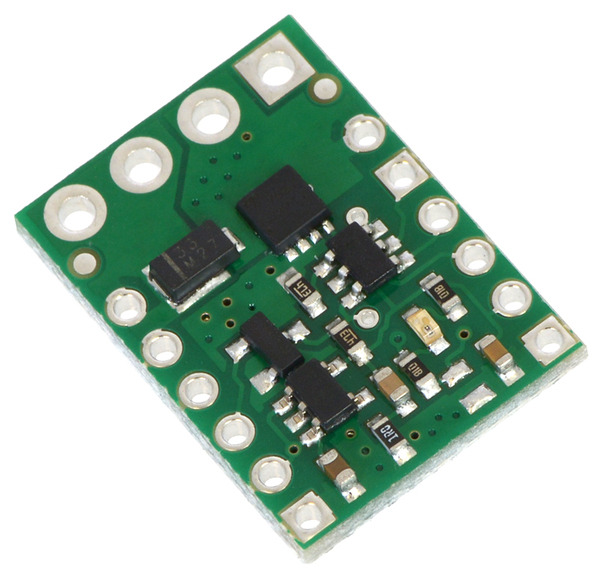 |
Last week we announced the Pololu RC Switch with Relay, the first product in our overhaul of the RC Switch family. Today we released the second new RC Switch product, the Pololu RC Switch with Medium Low-Side MOSFET. This board converts hobby radio control pulses to digital on/off signals and has an integrated medium, low-side MOSFET that allows it to drive moderate loads (up to around 15 A), such as lighting or small actuators.
This product replaces item #1211 and includes valuable new features such as a safe-start mode and user-configurable input direction and threshold.
For more information about the Pololu RC Switch with Medium Low-Side MOSFET, see the product page.
Related posts:
- Our RC Switch overhaul is complete
- New product: 4-Channel RC Servo Multiplexer
- New product: Pololu RC Switch with Relay
New product: Pololu RC Switch with Relay
 |
We are overhauling our RC Switch family of products, starting with a new and long-awaited addition, the Pololu RC Switch with Relay. This RC relay board makes it easy to control large loads within radio control (RC) systems. Here is an example setup with a typical RC receiver controlling the switch:
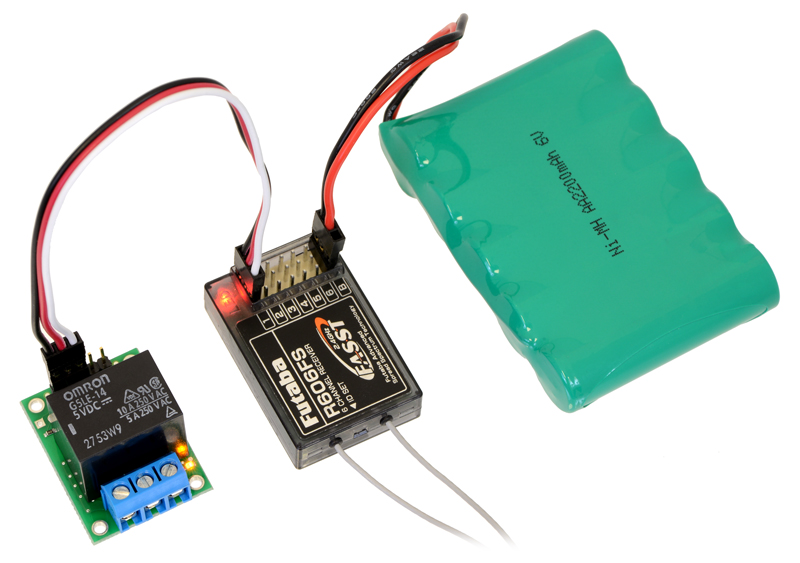 |
The Pololu RC Switch with Relay has advanced features not present in earlier RC switch products, including a safe-start mode and configurable input direction and threshold.
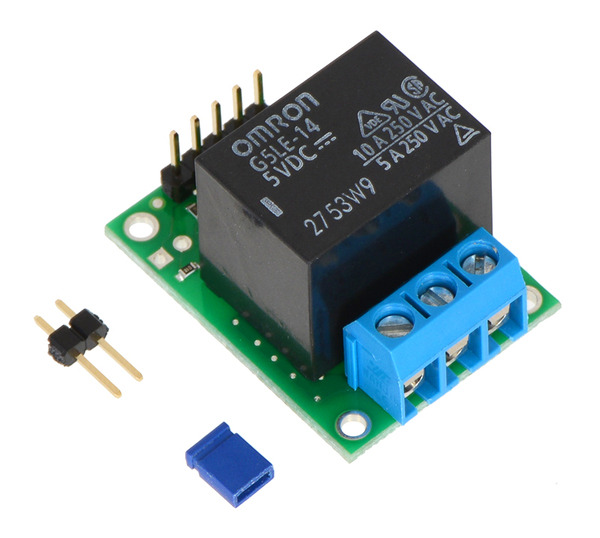
In addition to the assembled version shown above, a partial kit is available for specialized applications such as custom connectors or alternative relays:
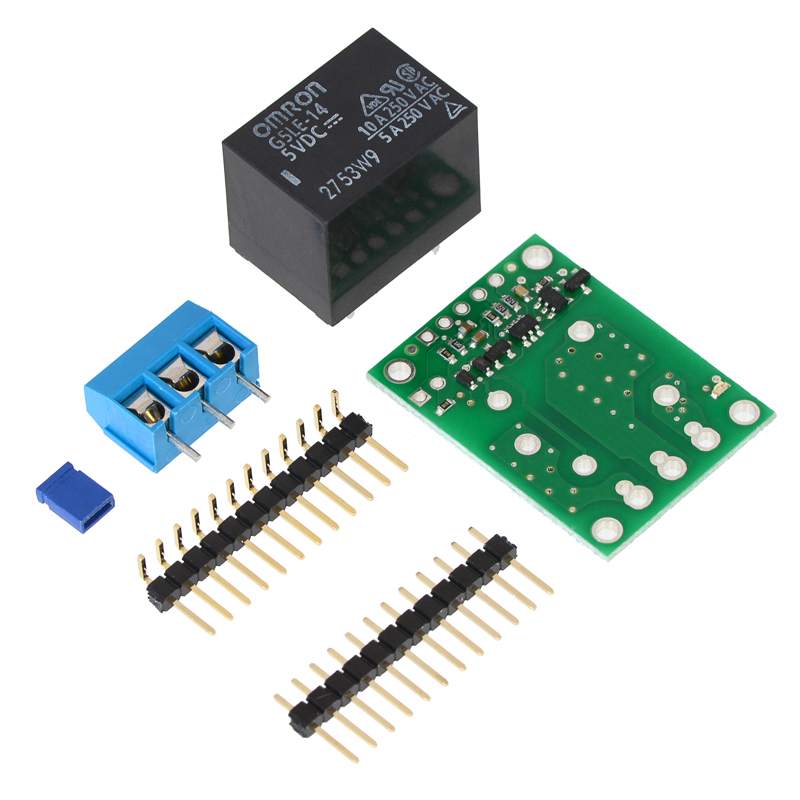 |
Pololu RC Switch with Relay (Partial Kit). |
|---|
For more information about the Pololu RC Switch, see the product page.
Related posts:
- Our RC Switch overhaul is complete
- New product: 4-Channel RC Servo Multiplexer
- New product: RC Switch with Medium Low-Side MOSFET
Highlights from the LVBots September 2013 mini-sumo competition
LVBots held a mini-sumo competition at Pololu on September 19. With a total of 19 robots participating, we got to see a lot of different strategies, from passive to aggressive to deliberately misleading. Sensing technology was of key importance, with robots using everything from sonar and optical rangefinders to accelerometers. See the range of designs for yourself in this video compilation from the contest:
Do you live in Las Vegas, or are you passing through? Stop by this evening to see the robots in person! You can find out more about LVBots or sign up on our Meetup page.
Featured link: http://www.youtube.com/watch?v=biiSHoyjBzY
New product: Arduino Robot
 |
We now carry the Arduino Robot, the first official Arduino on wheels, which includes a pair of ATmega32U4-based platforms that control two motors, sensors, and more. From the Arduino blog post about it:
Designed in cooperation with Complubot, 4-time world champions in the Robocup Junior robotics soccer, the Arduino Robot promises endless hours of experimentation and play. It is a self-contained platform that allows you to build interactive machines to explore the world around you.
You can use straight out of the box, modify its software, or add your own hardware on top of it. You can learn as you go: the Arduino Robot is perfect for both the novice as well as those looking for their next challenge.
For more information about the Arduino Robot, see the product page.
New product: RoboClaw 2x60A with USB (V4)
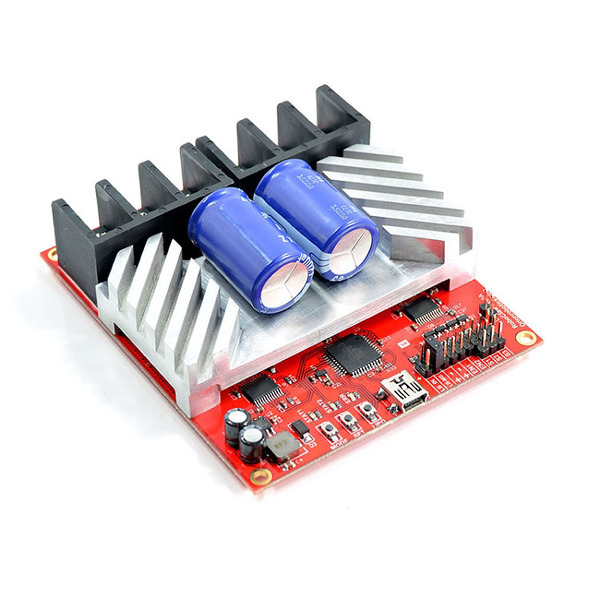 |
We are now carrying the V4 revision of the RoboClaw 2×60A motor controller from Orion Robotics. This new revision is similar to the original 2×60A version but has a new board design and some new features like USB connectivity. We expect to have an updated datasheet soon.
Read more on the product page.
New product: Arduino Yún
 |
We are now carrying the Arduino Yún, an exciting new board that combines Arduino with Linux. From the official announcement:
Arduino Yún is the combination of a classic Arduino Leonardo (based on the Atmega32U4 processor) with a Wifi system-on-a-chip running Linino (a MIPS GNU/Linux based on OpenWRT). It’s based on the ATMega32u4 microcontroller and on the Atheros AR9331, a system on a chip running Linino, a customized version of OpenWRT, the most used Linux distribution for embedded devices.
Like a Leonardo, it has 14 digital input/output pins (of which 7 can be used as PWM outputs and 12 as analog inputs), a 16 MHz crystal oscillator and a micro USB connector.
Like any modern computer, it’s Wi-Fi enabled, it has a Standard-A type USB connector to which you can connect your USB devices and it has a micro-SD card plug, for additional storage.
For more information about the Arduino Yún, see the product page.
Four new NEMA 23 hybrid stepper motors
We have expanded our selection of NEMA 23-size stepper motors:
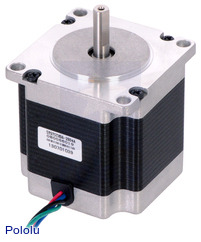 |
Three of the steppers are in a new 57×56 mm size. We are carrying three voltage/current options: 7.4V, 1 A/phase, 3.6V, 2 A/phase, and 2.5V, 2.8 A/phase.
 |
We have also added a new 4.5V, 2 A/phase option to our selection of larger 57×76 mm stepper motors, at an intermediate point between the 8.6V, 1 A/phase and 3.2V, 2.8 A/phase motors.
We carry one other NEMA 23-size motor in a 57×41mm, 5.7V, 1 A/phase configuration, as well as many other stepper motors.
Closed Monday, September 2
We will be closed on Monday, September 2 in observance of Labor Day. Orders placed after 2 PM Pacific time on Friday, August 30 will be shipped on Tuesday, September 3.


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation









