Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 10)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
BoboBOT
 |
This robot has a 3d-printed chassis and uses Pololu micro metal gearmotors and a Pololu Qik 2s9v1 dual serial motor controller. BoboBOT can compete in Mini Sumo competitions, and under remote control, it can be used to solve Sokoban-style puzzles:
Featured link: http://madebyfrutos.wordpress.com/2013/01/12/bobobot/
Daryl robot
 |
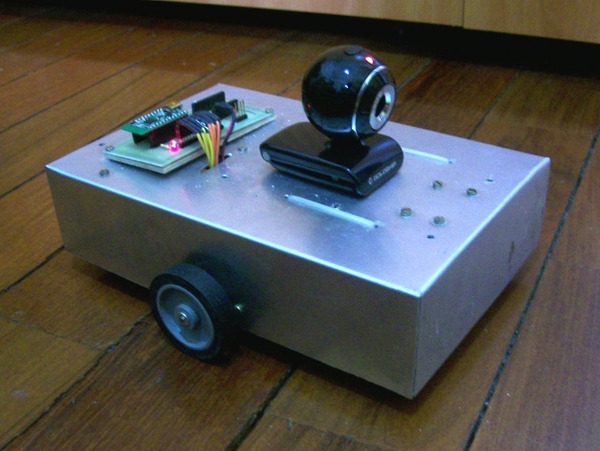
This autonomous robot, “Daryl”, is based on an Arduino Uno and controlled with a touchscreen Java app. Daryl uses a TReX to control its motors and a Micro Maestro to pan a camera/sensor module.
Here are some videos of Daryl:
There is more information on the creator’s blog (in French) and in this forum post.
Featured link: http://forum.pololu.com/viewtopic.php?p=30049#p30049
BentoBot
 |
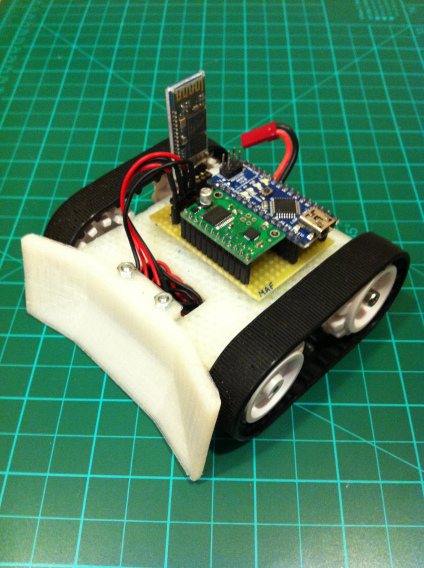
BentoBot is a robot designed to compete in a Mini Sumo competition. It uses a Zumo chassis, 100:1 micro gear motors, and a TB6612FNG motor controller. Here is a video of BentoBot competing at the 2012 Atlanta Hobby Robotics Club Robot Rally:
See this forum post for more pictures and information about BentoBot.
Featured link: http://forum.pololu.com/viewtopic.php?p=29649#p29616
Bird Buggy
This robot by Andrew Gray is a mobile platform that a parrot can use for transportation. When the parrot leaves the platform, it uses a vision system to autonomously dock with a base station. Bird Buggy uses Wild Thumper wheels, Pololu 25D mm metal gearmotors, and a Pololu TB6612FNG dual motor driver carrier.
Featured link: https://sites.google.com/site/birdbuggy109/
Robockey
Robots in the “Robockey” tournament at Penn used Pololu motors, hardware, and wheels to build teams of fully-autonomous hockey-playing robots.
Featured link: http://www.youtube.com/watch?v=7njq2hFbw14
Raspberry Pi - Real Time Control via Android HTML5
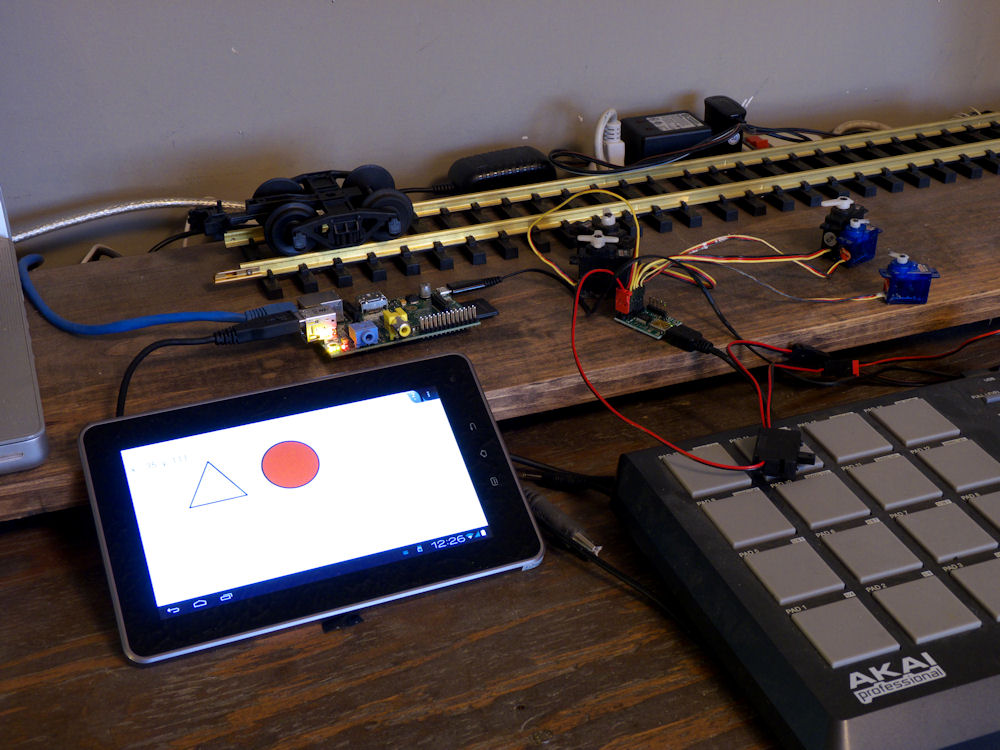 |
Martin Sant posted some code that does web-based real time control of the Pololu Micro Maestro 6 channel servo controller using a Raspberry Pi and the Tornado web server.
Featured link: http://martinsant.net/?page_id=479
Coke Can Robot
This autonomous robot can also be controlled by an old remote control to choose different actions. It uses our compact Step-Up/Step-Down Voltage Regulator S8V3A.
Featured link: http://www.youtube.com/watch?v=jgm9DhS7vS4
Solar Tracker
This solar tracking robot uses RC servos, light sensors, and a Mini Maestro to find the sun and point a solar panel directly at it.
Featured link: http://www.youtube.com/watch?v=4abMkyPoGcs
Wixel-controlled robot
 |
This robot uses a Wixel as the controller and is driven by stepper motors. Its source code is available in a forum post.
Featured link: http://forum.pololu.com/viewtopic.php?p=28678#p28678
Rover 5 chassis with Wild Thumper wheels
This Arduino-controlled robot commands the Rover 5 chassis and uses a LSM303DLH 3D Compass and Accelerometer Carrier with Voltage Regulators to determine which direction to go. The caterpillar treads were replaced with the Wild Thumper wheels.
Featured link: http://www.youtube.com/watch?v=43zqBtQyBF0


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










