Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 11)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
S3 Pilot board robot
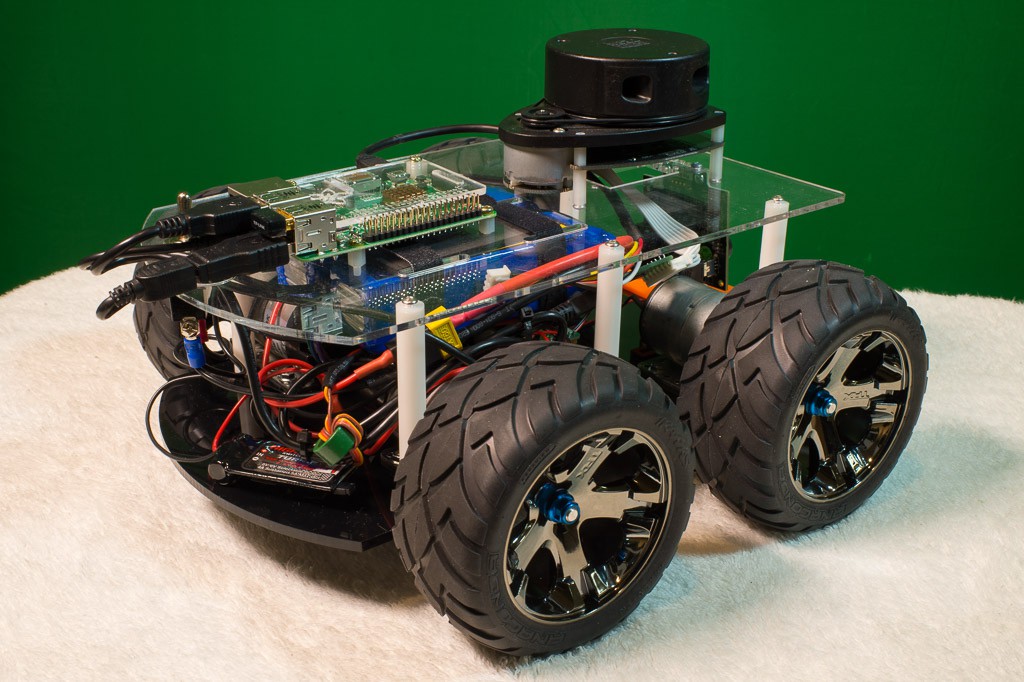 |
Forum member spiked3, whom we previously posted about, has shared another robot with a custom laser cut chassis. The new robot uses his own custom Arduino shield, the S3-Pilot, which has sockets for an IMU and two of our MC33926 Motor Driver Carriers.
 |
Custom Arduino shield created by forum member spiked3. |
|---|
The MC33926 drivers control two 37D motors with encoders, and the encoder signals are processed by the Arduino. The robot also includes a lidar, PIXY Cam, and Raspberry Pi. The on-board IMU and encoders allow the robot to keep track of where it is and what direction it is facing, so spiked3 was able to implement a high-level interface for the robot that accepts movement commands like “go forward three meters” or “turn a certain number of degrees to the right”.
You can find out more about this robot and see some videos of it being tested on spiked3’s blog.
Related products




Bohlebots at the German Open in RoboCup Soccer 1v1
 |
In March, I wrote a blog post about the Bohlebots robotics team winning the West German Robocup Soccer 1v1. Since then, the Bohlebots team has gone on to win first and third in the German Open Robocup Soccer 1v1 with their two robotics teams.
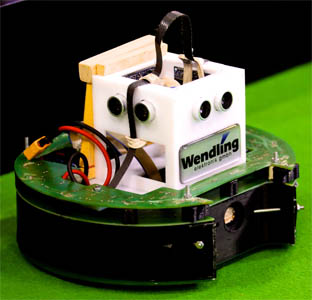 |
Bohlebots’ soccer robot. |
|---|
Good job Bohlebots!
Amanda's line following robot: Newbie
Many of the engineers and robot enthusiasts here at Pololu competed in the LVBots 2015 line following competition. (For house rules and details about how the competition was judged, see the LVBots line following rules page.) Unlike most of my peers this was my first competition at LVBots, so I thought it was fitting to name my robot “Newbie”. Newbie uses a servo to steer the front wheels, creating fluid movements in and out of turns. At least that was the plan; unfortunately, Newbie had complications. Continued…
Grant's line following robot: Pinto

My entry for the LVBots line following competition last month was a rehash of my line following robot from last year, Pinto. Unfortunately, my robot from last year robot never made it to the competition: while trying to get it to work last minute, it literally vibrated itself apart. I did not execute my ideas very well, but I still think my overall plan was not a bad one. Since I still had all the parts, I decided I wanted to revive the robot and try to follow through with my plan. Continued…
Nathan's line following robot: Suckbot

After branching off into maze solving, pushing into sumo, and finding our way through dead reckoning, we circled back and had another line following competition at LVBots. I started designing the Suckbot before the previous line following competition over a year before this one, but the design dragged on and there was no urgent push to get it finished without another competition. The robot is designed to suck itself down to the course so it can go faster. I was able to get it following lines and sucking, and I managed to post some middle-of-the-pack lap times, but there was some unexpected behavior when tuning the PID parameters just before the competition, and I think there’s quite a bit of room for improving the robot’s performance in the future. Continued…
Jeremy's line following robot: Zumo Slim
I recently competed in the LVbots line following robot challenge, where I took third place with the fourth fastest robot (due to lucky placement in the bracket). This was my second line following competition. I learned some valuable lessons from my first competition, such as bigger motors are not always good for going faster, so I focused my build on making a lightweight robot this time. Continued…
Claire's line following robot: Oddish
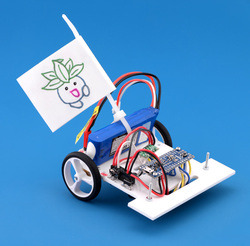
A few weeks ago the local robotics club, LVBots, hosted a line following competition here at Pololu, and like many of the engineers here, I built a robot, which I named Oddish, for the competition. I really only started seriously working on my robot about a week before the competition, so when I made the final decisions about what components to use I aimed for simplicity. In the last year we have come out with several A-Star microcontroller boards that include switching regulators, so I thought it would be fun and simple to make a line follower using an A-Star as the brain and its built-in 5 V regulator to power all the other components. I chose the A-Star 32U4 Mini LV for its operating voltage range and size. Continued…
Brandon's line following robot: The Chariot

For the recent LVBots line following competition, my first instinct was to try to come up with some unique alternative design for a robot that would be competitive with the traditional differential drive robots. However, I knew the winning robot from the last LVBots line following competition (Mostly Red Racer) would be returning, and it had an impressive time to beat. I also remembered spending so much time designing and assembling the hardware for my last line following robot, that I ended up not having enough time to tune the PID coefficients and get the performance I was hoping for. After brainstorming a few ideas, I ended up deciding to keep it simple and make sure I had enough time to get a robot I was happy with, which I ultimately named “The Chariot” because of its shape. The Chariot ended up winning second place in the competition, which I was very happy with. Instead of focusing this blog post on how you can make your own version of The Chariot, I will try to explain my thought process throughout the design and build process, In other words, my hope is that after reading through this post, it will be clear why I chose the parts that I did. Continued…
Jon's line following robot: Usain Volt 2.0

Like other developers and engineers here, I made a robot for the LVBots Line Following Contest. This post describes my robot, Usain Volt 2.0, and details some of what I was thinking when I designed it. If you want to know more about the competition rules and how it was judged, see the LVBots line following rules. Continued…
David's line following robot that learns the course
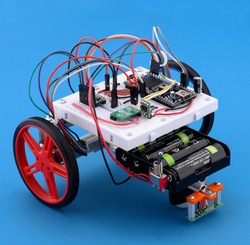
Several people here made robots to compete in the recent LVBots line following competition. The goal of the competition is to make an autonomous robot that follows a line on the ground as fast as possible. I made a robot called LearnBot for the competition. LearnBot is able to learn the line course on the first lap and then use that information to its advantage on the second and third laps. Continued…


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










