Pololu Blog »
Maker Faire demo: Simple Motor Controller and Sharp analog distance sensor
The Las Vegas Mini Maker Faire 2014 was on April 5th, and as you might have heard, we had a booth there with demos of our products. For more about the Faire and a video, see my previous blog post. This post details the Simple Motor Controller and Sharp analog distance sensor demo that we had on display at the Faire. The demo was popular with both kids and adults, and though it is simple, it is a great tool for showing those who are just getting interested in robotics what one of the first steps to building a robot might look like.
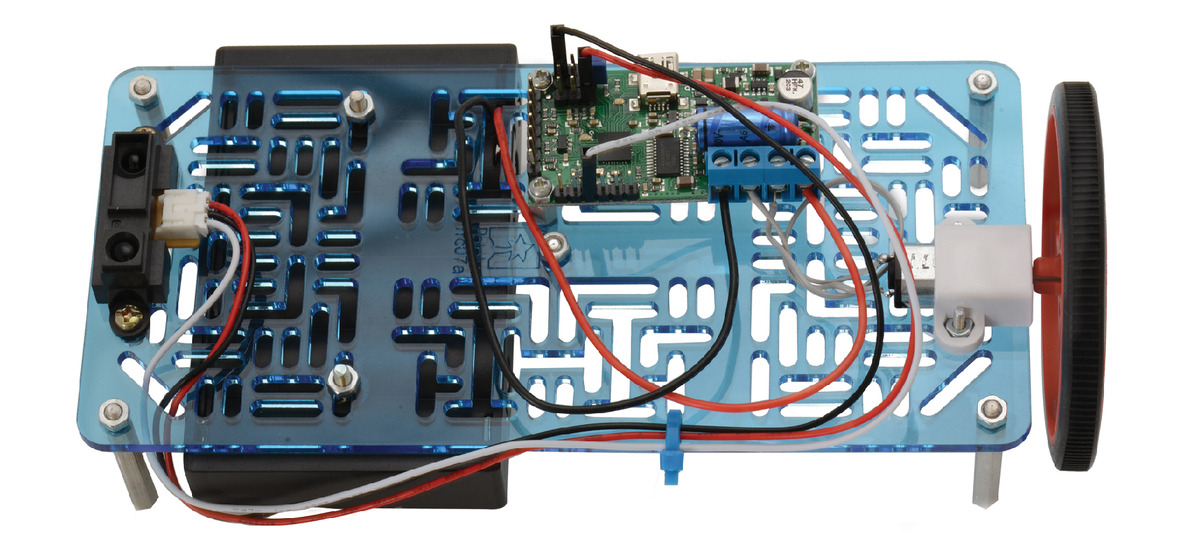 |
The demo uses the analog output of a Sharp GP2Y0A21YK0F Analog Distance Sensor connected to a Simple Motor Controller 18v7 to control the speed of one of our 30:1 Micro Metal Gearmotors. The sensor has a range of 10 cm to 80 cm. As your hand (or other object) moves from the top of that range closer to the sensor, the motor spins faster, and when nothing is detected by the sensor, the motor stops. To get that behavior, the SMC was set to analog input mode and its scaling was adjusted so readings lower than those received when an object is detected are mapped to the neutral range of the controller. A copy of the settings file used in the demo can be downloaded here (3k txt).
An RP5/Rover 5 expansion plate was used to mount all the components of the demo, including the sensor, controller, motor, and a 6-AA battery holder. The motor was mounted to the plate with one of our plastic micro metal gearmotor brackets and a 60×8 mm wheel was attached to the output shaft of the motor to make it easier to see the shaft turn. A full list of the parts used in the demo is given below:
- Pololu Simple Motor Controller 18v7
- Sharp GP2Y0A21YK0F Analog Distance Sensor 10-80cm
- 30:1 Micro Metal Gearmotor
- RP5/Rover 5 expansion plate
- Pololu Wheel 60×8mm Pair – Red
- Pololu Micro Metal Gearmotor Bracket Pair – White
- Aluminum Standoff: 1-1/4" Length, 4-40 Thread, M-F
- Aluminum Standoff: 1/4" Length, 2-56 Thread, M-F
- 6-AA Battery Holder
- 3-Pin Female JST PH-Style Cable (30 cm) with Female Pins for 0.1" Housings
- 0.1" (2.54mm) Crimp Connector Housing: 1×1-Pin 25-Pack
Related products



-

PID line follower with 5" robot chassis
- 18 April 2014This PID line follower, originally featured in this Let’s Make Robots post by user Enigmerald, uses our 5" Robot Chassis along with 30:1 MP micro...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation

