Pololu Blog »
AIRbot
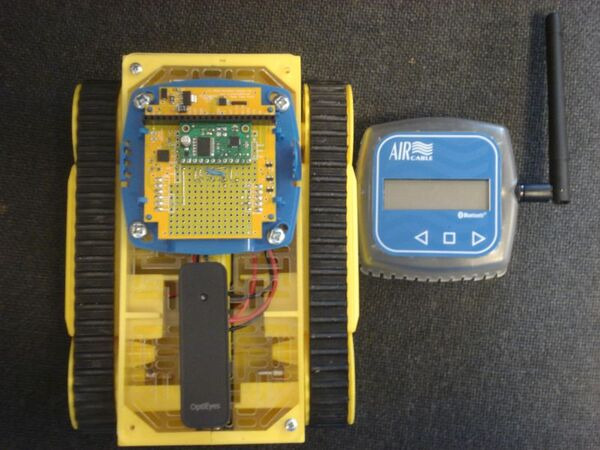 |
AIRbot is a robot that can be controlled by a cellphone and can send images back to the cellphone. It uses a yellow RP5 tracked chassis, a transparent clear RP5 expansion plate, and a qik 2s9v1 dual serial motor controller along with the AIRcable S.D.K. and the AIRcable OptiEyes. The source code (both AIRcable and Nokia) and circuit diagrams are freely available.
Featured link: http://wiki.opensensors.org/airbot
-

Automatic Infrared Light Source Tracking HD Camcorder
- 26 February 2010In this project, an HD camcorder sits on a pan/tilt mount controlled by a Micro Maestro 6-Channel USB Servo Controller. A Wiimote is used to track...
-

Obstacle Avoider
- 14 June 2010This simple obstacle-avoiding robot by forum user TomatoWire is based on the Maestro and uses continuous-rotation servos and distance sensors....
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










